There are a variety of wheel designs out there that can provide for rotation and translation in various directions. The differential swerve drive, though, as demonstrated by [WildWillyRobots], uses regular wheels on a complex mount to achieve impressive directional flexibility.
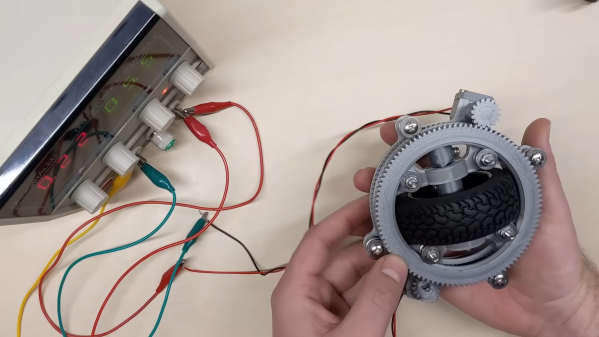
The design uses a regular round wheel mounted on an axle, which has a gear on one end. This allows the wheel to be driven. The wheel and axle is mounted upon a circular carrier, which is then fitted with a pair of surrounding gears on bearings. Differentially driving these gears changes the way the drive behaves. With both gears driven in the same direction, the wheel rotates on its vertical axis to point in different directions. If both gears are driven in opposite direction, the wheel itself is driven. Relatively varying the speed of both gears allows the direction and drive of the wheel to be controlled. The result is a wheel that can rotate to any angle, and then be driven forwards or backwards as well.
Fitting a set of these wheels to a robot creates a highly maneuverable platform. As a bonus, it doesn’t have the drawback of poor grip that is common with various omniwheel-type designs.
Continue reading “Differential Swerve Drive Is Highly Maneuverable”









