
Another day, another Kickstarter. While we aren’t often keen on touting products, we are keen on seeing robotics and unusual mechanisms put to use. The Goliath CNC has long since surpassed its $90,000 goal in an effort to put routing robots in workshops everywhere.
Due to their cost and complexity, you often only find omni-wheels on robots scurrying around universities or the benches of robotics hobbyists, but the Goliath makes use of nine wheels configured as three sets in a triangular pattern. This is important as any CNC needs to make compound paths, and for wheeled robots an omni-wheel base is often the best bet for compound 2D translation.
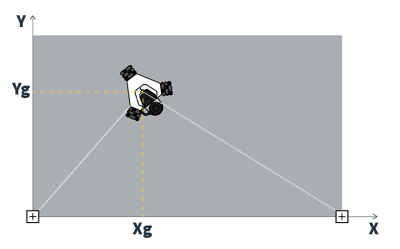 What really caught our eye is the Goliath’s unique positioning system. While most CNC machines have the luxury of end-stops or servomotors capable of precise positional control, the Goliath has two “base sensors” that are tethered to the top of the machine and mounted to the edge of the workpiece. Each sensor connects to the host computer via USB and uses vaguely termed “Radio Frequency technology” that provides a 100Hz update for the machine’s coordinate system. This setup is sure to beat out dead-reckoning for positional awareness, but details are scant on how it precisely operates. We’d love to know more if you’ve used a similar setup for local positioning as this is still a daunting task for indoor robots.
What really caught our eye is the Goliath’s unique positioning system. While most CNC machines have the luxury of end-stops or servomotors capable of precise positional control, the Goliath has two “base sensors” that are tethered to the top of the machine and mounted to the edge of the workpiece. Each sensor connects to the host computer via USB and uses vaguely termed “Radio Frequency technology” that provides a 100Hz update for the machine’s coordinate system. This setup is sure to beat out dead-reckoning for positional awareness, but details are scant on how it precisely operates. We’d love to know more if you’ve used a similar setup for local positioning as this is still a daunting task for indoor robots.
A re-skinned DeWalt 611 router makes for the core of the robot, which is a common option for many a desktop milling machine and other bizarre, mobile CNCs like the Shaper Origin. While we’re certain that traditional computer controlled routers and proper machining centers are here to stay, we certainly wouldn’t mind if the future of digital manufacturing had a few more compact options like these.














Looks like the sensors are string-pots – the wire is measured in & out of an internal drum, the positions sent back over an RF link. Nothing magical there. I can’t see how it avoids errors due to rotation of the body between the sensor attatch point and the cutter axis though,
“Explanations exist; they have existed for all time; there is always a well-known solution to every human problem — neat, plausible, and wrong.” (H.L. Mencken)
It will have a list of issues they have not shown as solvable yet, but focused on what will happen if they succeed beyond marketing.
Rotary encoders on two diffrent points which show the angle as well, would be capable of overcoming those issiues. I would worry more about the grip of those wheels, regarding the dust letting them slip quite a bit. And don’t forget the Buildplate has to be bigger than the workpiece, which ether results in lots of waste or in unclean cuts.
It looks like each sensor connects by string to a different bearing. This allows each of them to spin freely keeping them from wrapping around the machine or each other. Genius! I Hadn’t figure that out yet, but I was having trouble just getting a cheap rotary encoder and an arduino mega to accurately get position in the project https://hackaday.io/project/14735-simple-cheaper-cnc-shaper.
I can only imagine that after a while the omni-wheels could have trouble when the surface gets all cut up and the angle of the machine changes. That would affect positioning.
Repurposing one of those old usb rf pen scratchpad style tablet interfaces would be a good way to go, if you could stop it cutting it. Put the pcb with all the traces below the work piece. Just down the cut depth. Then use the cutting tool as the rf antenna.
Hang it from above, parallel to the working plane.
The shaper origin actually doesn’t use the Dewalt anymore, but a far superior unit developed by Festool. I really think the shaper origin is a better way to do portable cnc, since your arms probably deliver way more grip than the wheels in this thing. Probably works fine on softer woods, but I highly doubt that it is going to make significant depth cuts in hard woods without slipping. What i’m basically saying is that I really want a Shaper Origin now it uses a Festool router. Would love to start cutting up larger sheets of wood. My diy cnc only is capable of 60cmx80cm….
I’m super into the idea of the shaper but I can’t get my head around the tape (I get how it works – just don’t really like the idea of a consumable like that). Would love to see another tracking option for it. I wonder if mo-cap or any of the current systems in use for VR (vive lighthouse etc) would be accurate enough?
I was wondering about using the vive lighthouses and a tracking puck. The router vibrations might be an issue, but a puck should deliver around 0.1mm from what I remember.
Or a projector to project the markings on your workspace?
Have a look at http://www.maslowcnc.com/ if you want bigger, some big improvements are being made all the time.
At this point when I see ‘kickstarter” I automatically think ‘oh, a BS scam, nm then’
I guess the management failed at keeping the predictable at bay enough to stop this synonym from becoming a practical reality
Same here. KickScammer, IndieStopStop, GoScamMe,… Some ideas are great. Some are even successful. For the most part they are all BS.
Without failure, success is not definable, or some such paraphrase of the citations from Tao Te Ching (Lao Tzu).
We can’t avoid the shortcomings of crowdfunding, but we can hope that a few successful stories make it all worthwhile.
“The majority of dust and debris is pushed aside or rolled over by Goliath’s omnidirectional wheels. We have put Goliath CNC through testing to confirm that this does not affect the precision of the robot.”
Mmm… a router produces an awful amount of sawdust that quickly builds up if you don’t have some sort of dust extraction fitted. The Goliath doesn’t seem to allow for that. Even if the dust won’t affect the robot – I seriously doubt that – it will certainly affect your lungs.
“We have put Goliath CNC through testing to confirm that this does not affect the precision of the robot.”
Did they really test the precision in Z? I’m pretty sure that even one million corrections per second won’t change the fact that when you’re rolling over debris it changes both the angle of the bit and the Z cutting depth.
Probably still good enough for wood but I wouldn’t try and cut aluminium with it, maybe not even plastic.
Well, I also have my doubts about it cutting wood effectively. My plunge router is by far the most terrifying tool in my workshop and takes quite some effort to control. Precise work like cutting dado’s always requires a jig with guide rails to keep the router from jumping all over the place.
This is a good idea for people who don’t have a lot of space to dedicate to a frame-based CNC router. Much better than the one where you had to put stickers on the wood, but I agree that it looks awful lightweight so likely to jump around, and probably would have trouble with uneven surfaces, etc.
But I do applaud the idea. I wonder what the perfect implementation looks like. Big magnets probably :-)
So far the only large format, small storage CNC design I’d trust is Printrbot’s Crawlbot: https://printrbot.com/shop/printrbot-crawlbot/
But that’s $3,200 for a machine that can only cut plywood within a certain range of sizes. The other day I had to cut parts out of a 12×24″ sheet of 0.125 ABS. In cases like this all of these fall flat.
It’s not cheap. But then again, it’s a real product and not a kickstarter fantasy. It’s vertical travel limits the amount of “carving” it can do, but nothing stopping you from attaching it to a 3×4 piece of scrap and clamping your 12×24″ wood to it. Shoot, if the SO ain’t home, you can strap this down to your kitchen table!
The design principle is simple enough that it’s well within reach of anyone who’s built their own CNC.
That’s a good point – strapping it to a base of plywood..
they’re cute now but when the robot apocalypse comes you’ll be afraid
how do you prevent the router from catching and spinning the robot around?
Tehe
Dont worry, they’ve included bearing to connect the tracking line and prevent tangling if it does append.
“While we aren’t often keen on touting products” I almost died laughing.
I have no idea why the DeWalt 611 is so popular. I bought one once, tried it at home, couldn’t believe the screaming noise it did whatever speed it was set to, returned it. Bought a Hitachi M12VC, best router ever.
From having a large table based CNC router, I see a issues- maybe the machine is able to deal with them, its hard to tell.
1) Does the machine have absolute positioning – ie can you route with a bit, turn over the router and change bits, and then continue routing with the machine able to figure out where it again? This is important if you want to change router bits, and, especially for plywood, I usually change router bits for a particular piece. If the machine cannot find its origin again after you move it, it would be worthless for a lot of materials and items.
2) Is the machine heavy enough to handle upcut bits? Downcut bits suck the router to the surface, but also force the wood chips into the hole instead of out, which leads to burned bits and burned holes. So a lot of your cuts are using upcut bits which blow chips out of the hole. However, this is less stable and won’t work unless you have a heavy machine and grippy tires. I would suspect this machine cannot do much upcutting. I would have to have a vacuum system right by the router trying to suck all of the wood chips out in order to prolong my bit life. I don’t see that on the machine.
3) What router speeds are available, and is it adjustable? That 611 router stock comes with router speeds between 16,000-27,000 rpm. If you start doing the cutting speed math, this is way too high for most applications, and you have to use thin bits (1/4 or less) and provide fast translations to keep from burning your bits up. Its it has been modified (which can be done) to provide speeds as low as 8,000 rpm, this is far more useful. However, you would still need very fast translations do cut plastic without melting, and from the videos, I don’t know if that translation speed will cut it.
How controllable is your Z axis, and does it stay perpendicular to the work surface? With the bit positioned at the edge of the machine, the cantilever action here could cause the machine to lift and tilt, forcing you to very shallow cuts or dealing with cuts that are not perpendicular to the surface.
I’m seeing this machine as being useful for doing profile cutouts in mdf/plywoods, but not for hardwoods, metals, or plastics. I don’t think it will be precise enough to get glueless joinery-type fit people imagine. I also don’t think you will be able to use it to hog out a lot of material as you will be limited to bit diameter and shallow z passes. And I think you will burn up $25 bits at a rapid rate.
When will u guys be ready for production