
Forgive the click bait headline, but the latest work from [Marco Bartolucci] and [José A. del Peral-Rosado] is really great. They’re using multiple HackRFs, synchronized together, with hybrid positioning algorithms to derive more precise localization accuracy. (PDF)
 Like all SDRs, the HackRF can be used to solve positioning problems using WIFi, Bluetooth, 3G, 4G, and GNSS. Multiple receivers can also be used, but this requires synchronization for time-based or frequency-based ranging. [Bartolucci] and [Peral-Rosado] present a novel solution for synchronizing these HackRFs using a few convenient ports available on the board, a bit of CPLD hacking, and a GNSS receiver with a 1 pps output.
Like all SDRs, the HackRF can be used to solve positioning problems using WIFi, Bluetooth, 3G, 4G, and GNSS. Multiple receivers can also be used, but this requires synchronization for time-based or frequency-based ranging. [Bartolucci] and [Peral-Rosado] present a novel solution for synchronizing these HackRFs using a few convenient ports available on the board, a bit of CPLD hacking, and a GNSS receiver with a 1 pps output.
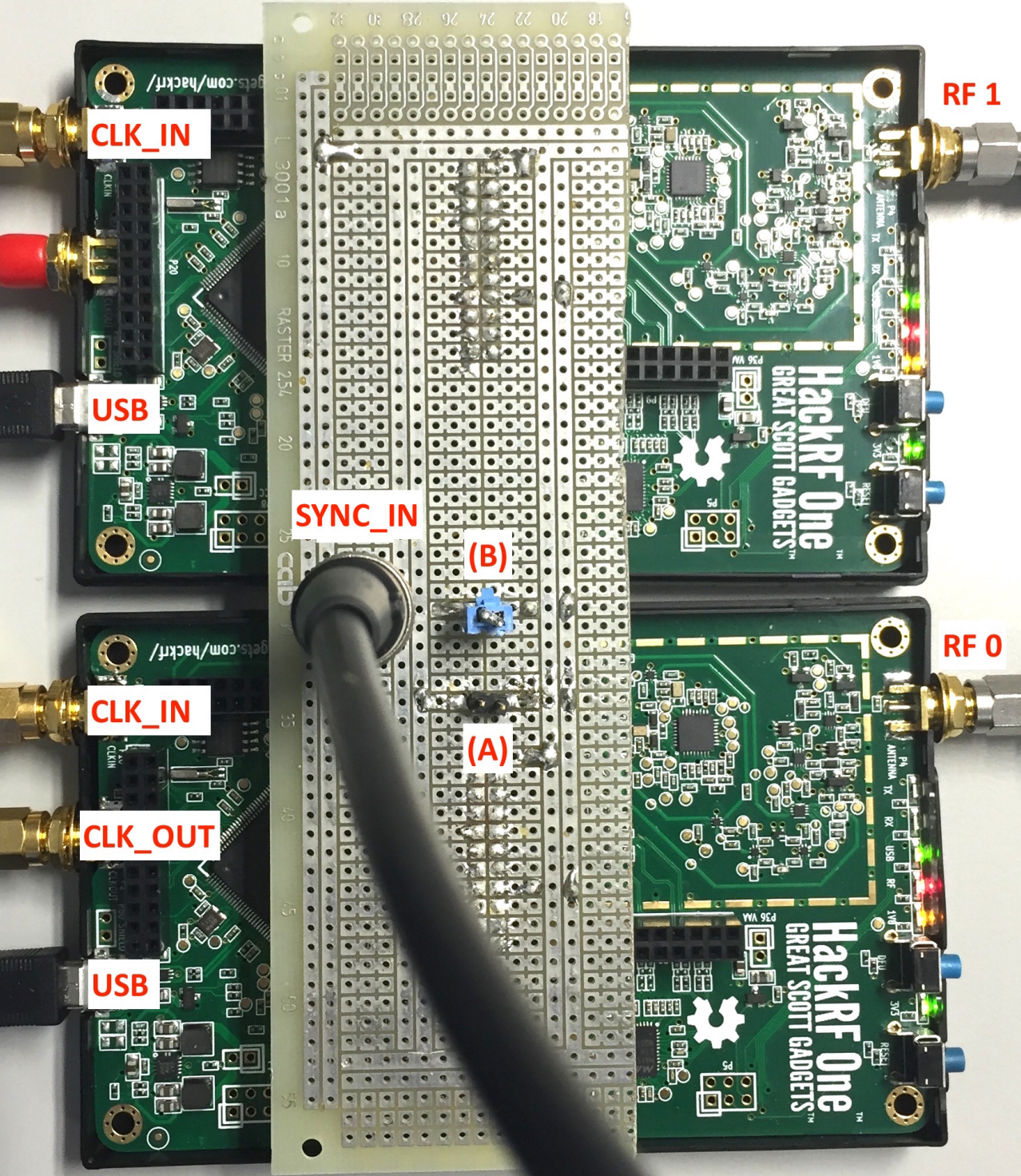
This is technically two hacks in one, the first being a sort of master and slave setup between two HackRFs. Using the Xilinx XC2C64A CPLD on board the HackRF, [Bartolucci] and [Peral-Rosado] effectively chain two devices together. The synchronization error is below one sampling period, and more than two HackRFs can be chained together with the SYNC_IN port of each connected together in parallel. Read more about it in their pull request to the HackRF codebase.
This simplest technique will not work if the HackRF receivers must be separated, which brings us to the second hack. [Bartolucci] and [Peral-Rosado] present another option in that case: using the 1 pps output of a GNNS receiver for the synchronization pulse. As long as both HackRFs can see the sky, they can act as one. Very cool!









