I recently finished the Silo series by Hugh Howey, a self-published collection of novellas that details life in a near-future, post-apocalyptic world where all that remains of humanity has been stuffed into subterranean silos. It has a great plot with some fun twists and plenty of details to keep the hacker and sci-fi fan entertained.
One such detail is nanorobots, used in later volumes of the series as both life-extending tools and viciously specific bio-weapons. Like all good reads, Silo is mainly character driven, so Howey doesn’t spend a lot of eInk on describing these microscopic machines – just enough detail to move the plot along. But it left me wondering about the potential for nanorobotics, and where we are today with the field that dates back to Richard Feynman’s suggestion that humans would some day “swallow the doctor” in a 1959 lecture and essay called “There’s Plenty of Room at the Bottom.”
Robots for Hearts and Guts
So in the intervening 56 years, have we gotten anywhere on the goal to an ingestible surgeon? Or are nanorobots a largely unfulfilled promise like hoverboards and flying cars? Like almost everything, the answer depends on how you look at it.
If we define a robot as an autonomous or semi-autonomous device that can sense changes in its environment and respond in some way, then the answer is a resounding “Yes.” Implantable pacemakers, available since 1958, certainly fit that description: they monitor the electrical patterns from the heart’s natural pacemaker and stimulate the heart via electrodes whenever necessary. Autonomous? Check. Senses the environment? Yep. Effects a change? Certainly – especially when you consider that some pacemakers have built-in defibrillators that can shock a heart back into rhythm. Sounds like a robot to me.

As for scale, I’ll admit that implantable pacemakers are far from nanometer scale, but we’re getting there. Miniaturization has taken us from a device the size of a deck of cards requiring surgical implantation in the chest down to Medtronic’s Micra, a pill-sized pacemaker that’s inserted directly into the heart via a minimally invasive catheterization procedure. It may not be nano scale, but the trend is in the right direction.
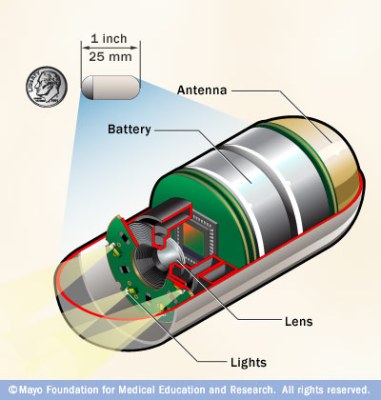
Some may argue that autonomy implies the ability to move around in an environment, but that’s certainly not something an implantable pacemaker does under optimal conditions. Its mission does not require mobility, so its design makes sense. For an example of a currently available mobile endorobot, we’d have to stretch the definition a little bit to include the tiny wireless cameras used during capsule endoscopy. This is a procedure used as a substitute for a traditional endoscopic exam; the pill-shaped camera is swallowed and sends video of the entire digestive tract to a receiver on the belt. The camera is mobile, but only by virtue of the movements of the digestive muscles. It can’t be steered – it’s on an unpowered one-way trip. Incidentally, the patient instructions are to wait for the camera to make a reappearance and then just flush it away; this sounds wasteful to me and any hacker worth his or her chops would want to recover the camera and take it apart. Think of the possibilities!
A Capsule Robot Toolkit
Shrinking pacemakers and tiny ingestible TV studios offer a glimpse of what future mobile endorobots might look like. After all, it’s not too hard to imagine a Micra-sized device piloting itself around inside the body with surgical rather than electrical actuators. Add in the camera to either send back images to a skilled surgeon or use on-board image analysis, and we’re getting really close to being able to “swallow the doctor.”
Adding propulsion to a capsule-sized endorobot would provide the mobility needed for fully autonomous operation; my first thought is micro-sized tank treads on the outside of the capsule that would grip the walls of whatever vessel the robot happened to be in. Or for an endorobot designed to navigate inside blood vessels, maybe jet propulsion by pumping blood from one end of the capsule to the other would work.
To accelerate development of capsule-sized endorobots, a team at Vanderbilt University has developed an open-source platform for capsule robots. A flexible circuit board that can be rolled up to fit within a capsule has space for multiple modules that can be mixed and matched for the job at hand. Current modules include power management and communications subsystems; a fleet of sensors including accelerometers, gyros, and magnetometers; and drivers for brushed and brushless DC motors for actuators and propulsion. They’ve even provided a web-based framework for designing systems using the module and simulating their functions. A stripped-down version of the system suitable for students and hobbyists will also be available.
Despite these advances, the promise – and the threat – of nanorobots as described in the Silo series is still the stuff of sci-fi. Our tendency is to miniaturize our gadgets, so my bet is that we’ll continue to shrink these capsule robots until we start pushing the nanometer scale. Until then, capsule robots are still pretty cool, and there’s a lot of potential for robots on this scale.















Mike’s teardown of a camera pill:
https://www.youtube.com/watch?v=osAKuPGhK3I
Nice find!
Come down to my basement, you can swallow the doctor and have robots inside you. ALL DAY LONG.
So, you’re making robotic meths now?
only the dirty minds…
https://en.m.wikipedia.org/wiki/Fantastic_Voyage
Did that and had to have it surgically removed 8 week later in 05