3D printers were never meant to be used for production. They’re not manufacturing machines, they’re prototyping machines. That doesn’t mean 3D printers can’t be used in a manufacturing context, it’s just very hard – you’d need someone manning a fleet of machines, or some sort of ‘automated build platform’ that won’t be invented for exactly fourteen years.
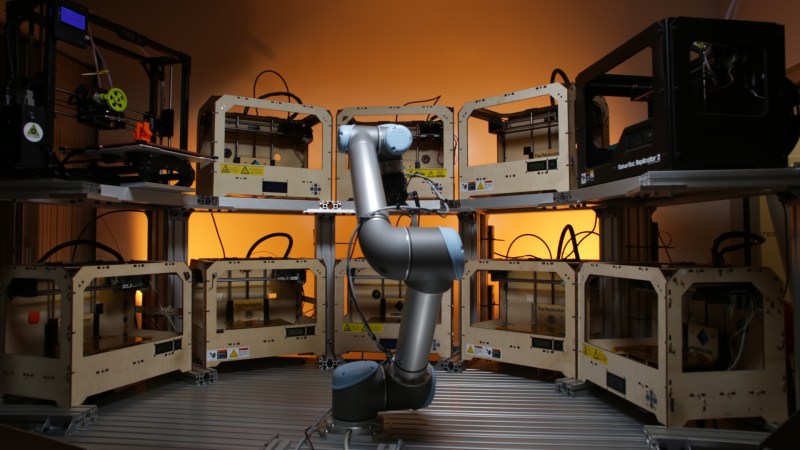
In the absence of someone paid to watch printers print, [Mark], [Robert], and [James] at tend.ai have created a way to manage a fleet of printers with a robot arm. It’s a robotic arm that automatically monitors the LCD on a rack full of 3D printers, plucks the finished prints off the bed, drops the parts in a box, and starts another print.
Tend.ai is in the business of cloud robotics, and have designed a system that takes any robotic arm, any webcam, and provides the backend for this robotic arm to – wait for it – tend to other machines. As a demo, it works well. Parts are picked up off of the machines, dropped into boxes, and another print run started.
As a tech demo for a cloud robotics platform, you can’t do much better than this. As a way to automate a fleet of 3D printers, I can only wonder how this robot arm system would work with large, flat printed parts. A robotic gripper could always be replaced with a spatula, I guess.
You can check out the demo and the ‘how they did it’ video below.















Pretty cool. Now we know where Amazon packs the 4 square centimeter items in the 8x12x14″ boxes.
I get that it’s a tech demo/proof of concept/sales pitch sorta thing but it just feels a little Rube Goldberg to me.
Neat demo maybe, but if you wanted to automate FDM printers you’d have a conveyor-belt for the print bed. Rotate the belt, part peels off and goes in the bin.
Of course if you’re doing production, you’re probably not using FDM. Using SLS or whatever, you can just dump the build-volume through a strainer to retrieve the parts and then recycle the un-sintered raw material. And you can print bucketloads of little parts throughout the whole build volume to maximise yield.
Airbus is already building plastic aircraft parts using FDM, and several other aircraft companies are experimenting with doing the same.
You’re right. It’s been done before, in the Thingomatic by Makerbot, and patented, and that’s why the article says “some sort of ‘automated build platform’ that won’t be invented for exactly fourteen years.”
While an arm is cool, an XYZ robot and a flat wall of printers would be more efficient. This would also allow for easy, endless expandability: Want to add another 8 printers – just make one or more axis longer. With the arm, the radius/circumference limits how many printers you could have arranged, especially considering you need a pathway for the empty boxes, box loading, and filled boxes to exit.
Also, constantly checking the LCDs on each printer and using a 7+ axis robot seems a bit silly – surely there’s a way to program the printers to communicate when they are done with a job, either as a communication over a network or something as simple as setting a gpio pin high.
While this is a great proof of concept and successfully executing the idea surely took a lot of time and effort, I think if this idea were to take off, the end product would be a much more integrated combination of manipulators and printers.
As a demonstration of versatility of the robotic arm, its awesome! I’ll take 3….
Question 1: Couldnt one program a 3D printer simply push the finished part out of the work area using the extruder? If so then I think the same result could be achieved by just having a chute or a conveyor belt collecting and dropping parts into boxes.
Question 2: If higher volume manufacturing is the goal, could a large framed 3D printer be designed with multiple extruders, all attached to the same XYZ stages? So essentially youd have one set of stages, one controller, but make say 4 parts at a time. Not sure if that would add more complication than just having 4 independent printers.
Absolutley right on point 1. Its been done before plenty of times. As for point 2, yes that has also been done. The only extra complexity comes from having to operate extra extruders. You’d also have to feed the stepper pulse and dir signals into multiple stepper drivers. Again, all been done before :-)
Why? just gang the extruders together onto the same bar or even a grid.
Prime example
http://www.vicious1.com/4-head/
The setup sounds like a cloud-based printing service, in which case the
printers would not necessarily be printing the same job.
Seen at National Maker fair this last weekend.
http://www.me.vt.edu/dreams/dreamvendor/
Awesome. I wonder if the robot AI can also be programmed well enough to add parts to the printed part like resistors, capacitors, wires,… while a second robot does the soldering.
How much are these robotic arms? I think the one shown is a UR5? Are there any good comparable open hardware arms out there?
UR robota start at around 20k USD. No, no comparable open source alternative
Looks like a good candidate for the hackaday prize: Universal robot arm joint.
Here is mine ;)
https://hackaday.io/project/2055-yarrm-7-dof-low-cost-robot-arm
It’ll cost you an arm and a leg :P
is this an art installation? because thats the only useful use case I can come up with
reading individual LCD screens? did they ran out of rube goldberg arduinos to link printers together ? :/
This is everything I dreamed the future would be. I’m crying geeky tears of joy.
The reason 3d printer aren’t usually suitable for production has nothing to do with the need for someone to man them or a fleet of them. It has to do with speed. Time is money in a production environment and it’s not just about labor cost. It’s also about opportunity cost. Lost time is time you could be making more money by cranking out pieces. A machine that takes hours to crank out a single piece is never going to be the answer in situation where mass production is desirable. Now, come up with a 3d printer that can crank out a piece in seconds and it’s whole different ball game. Anyway, this is the reason why 3d printers only make sense for prototypes or one off custom pieces.