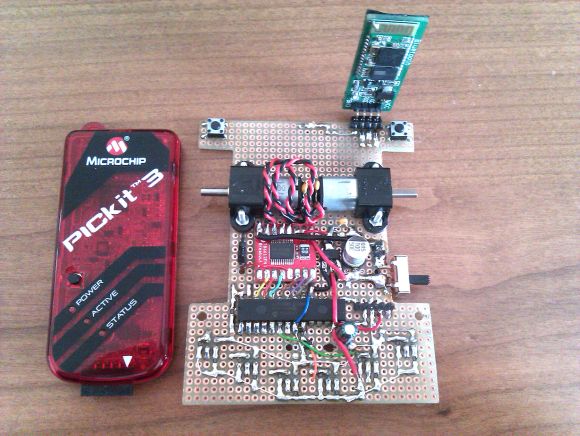
We love a good line-following robot project and this really hits the spot. It’s got sharp edges, gobs of solder bridging, and look at all those jumper wires! Despite its appearance it puts in a performance that won’t disappoint.
It uses a dsPIC33 to read from half a dozen analog sensors on the bottom of the board. We’re not all that familiar with the chip’s features, but [Exapod] says it’s got an auto-scan feature he uses to read the sensors. This allows him to sample with 12-bit resolution from all six of them at about 30 kHz. No wonder the thing is so responsive in the demo video embedded below. The track he’s using is just some white printer paper with a fat circuit of black electrical tape placed in a somewhat squiggly pattern.
This is also a fun challenge with toys. Here’s one that hacks a hexapod to follow the lines.
[via Dangerous Prototypes]














Best line following robot on protoboard: http://elm-chan.org/works/ltc/report.html
That “somewhat squiggly pattern” is this:
http://en.wikipedia.org/wiki/Italian_Grand_Prix
This is great protoboard work, i love it.
>This allows him to sample with 12-bit resolution from all six of them at about 30 kHz
i lol’d, STM32 can do 1MSPS
30Khz is not the sample frequency but the frequency of the pid loop (error calculation, and motor controller).
The pic used in the robot http://www.microchip.com/wwwproducts/Devices.aspx?dDocName=en532302 is capable of conversion of 10-bit at 1.1 Msps using the DMA controller but in a robot like this all this speed is not necessary.
The dsPIC33 can sample at 1MSPS too.
But try handling an interrupt every six samples on the STM32 at 1MSPS, then doing something intelligent with those samples, and see how much CPU time you have left. Or if sampling at 1MSPS versus 180KSPS (30kHz * 6) makes any additional difference in the performance of a robot that’s primarily limited by motor response time.
LOL indeed.
Every time I watch a Mythbusters episode where they have a car/truck/semi that they need to drive into a target, I do a facepalm that they use some stupid ineffective RC or cable guide kludge instead of a simple and way more accurate line following bot (and yes, they would still need a rc kill switch for safety).
Yeah, painting lines on unknown surfaces, waiting for the paint to dry, and having to troubleshoot the line following process, and making sure the vehicle can run under its own power (with precisely regulated speed) is waaaay easier than getting a portable winch and pulling the vehicle somewhere. /s
Wow, you are quite the ‘interneter’ aren’t you?
Those people working on the mythbuster show do get paid well btw, and most of their stuff has a lot of preparation and logistics to get it all together, just getting all the equipment on a spot and renting it and the red tape permission are already a shitload of work I imagine. and painting a line is too much you think? Yeah right…
Oc right plus if looses the white line there no way to manually correct. If you do ad rec to manually correct the you might as well rc in the first place. Cable hoist is simple and does the job.
Definitely a cool robot project. The toy project looks like one my friend would like to try.