[James] wanted to build a BEAM turbot. He ran into some problems with the BEAM circuitry though, and ended up with a BEAM/Picaxe hybrid.
Beam robotics are the brainchild of Mark Tilden. The acronym stands for Biology, Electronics, Aesthetics, and Mechanics. BEAM based bots were very popular with hobbyists in the 90’s and early 2000’s, but popularity has since died down. BEAM robots tend not to use microcontrollers, instead attempting to simplify things down to the lowest number of elements.
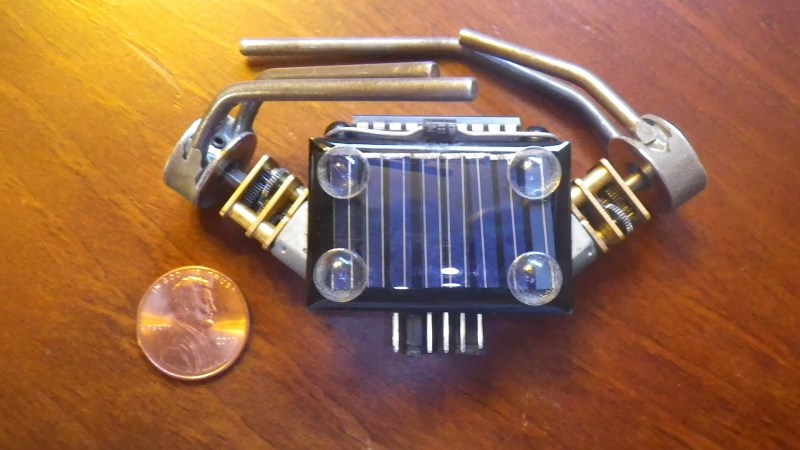
[James’] turbot uses a miller solar engine. The original design used the engine to drive a Solar Turbot Latch. [James’] problem was that the photodiode “eyes” of the robot were not properly enabling the 74AC245 to pass current to the motor. Since the robot was built in a tiny space, debugging the circuit was extremely hard. After struggling with the ‘245 for some time, [James] decided to swich out the BEAM circuit for a Picaxe microcontroller.
The Picaxe can only sink or source about 20ma per pin, which is slightly less than the no load current of [James’] motors. To make up for this, he ganged up four pins per motor. There was some risk in the motors blowing up the Picaxe. However between the lightly loaded gearmotors and low current solar panels it seems to be working just fine. Overall the bot is a very clean, compact build. Jump past the break to check out its really smooth crablike walking action.














Doesn’t much resemble a Scophthalmus maximus.
I’m absolutely sure “smashing into the ground repeatedly” is not one of the recommended working conditions for solar panels :P
Those have a pretty thick layer of plastic cast over them so it is pretty safe to bounce them around.
I have seen these kind of beam robots other places. What is the point of them? I have never understood.
I would like to know too!
I’d love to know as well.
One of the aspects BEAM lets you play with is the apparent complexity exhibited by a collection of these robots operating together. Check out ALIFE as a sarch term. Simple rules can exhibbit complex behaviours when applied in a group.
One of the points of BEAM is that you don’t need a complex brain to do that.
That is true. Even Zombies without any brain are able to manage to move forward somehow.
q.e.d.
Look for “beam bot” on wikipedia and other sites around the net.
In my opinion it’s the simplest device that can implement an electronic organism complete with “feeding” and moving towards more “food” driven by a “neuron” like circuit. It receives inputs from a couple of sensors and drives a couple of actuators. The idea is minimalism and resilience, since it’s usually built with just 6 transistors, some resistors and capacitors, and can “live” on very little current (while just “resting” while it’s not fed).
So, in conclusion it’s the simplest electronic organism. It feeds and moves (usually moves towards more “food” in the form of light).
If you look at the picture, the solar panel has four little plastic bumpers things.
To have fun making them and watch them come alive?
For the challenge of building the simplest/cheapest “life form” you can imagine?
Some things don’t have to have a clear goal…
The idea is to get very complicated behavior out of a simple analog circuit. It’s run usually by what’s called a nervous network or bicore which is basically two OP-amps running in a loop. The bicore runs the motors etc and accepts stimulus from whatever sensors you have attached. When you power on something like a beam walker, it just freaks out, because the loop is only amplifying noise, but if you supply it with something like a light sensor – a stimulus which ‘rewards’ positive action by increasing intensity the closer you get to the source, then you effectively coax it to walk. Because the most efficient walking patterns will bring the walker closer to the light, it becomes ‘trained’ into performing the action with increasing skill.
Oh oh. something someone else does has to have a point!
Wow.
I never thought I’d see that acronym or Mark’s name again. The last time I heard either was almost a decade ago, back when BEAM was seriously hot for hobbyist kits and such. You used to see that stuff all the time at the local university robotics conventions, there’d always be a table with a few bright lamps pointed down at an enclosed area with a bunch of BEAM bots jumping around trying to compete for the brightest light possible.
In case anyone was wondering, BEAM was more or less about building the simplest robot possible to mimic certain real life attributes of bugs and insects. Very little of that stuff used any kind of digital circuitry more advanced then a voltage sensor or a transistor. Most of it was usually equipped with a solar panel or two and basically just ran around trying to stay in the light, though occasionally someone would pull off an awe inspiring circuit hack and get the thing to do something truly interesting with only a handful of through-hole parts (more often then not, without any PCB whatsoever- that was kinda part of the BEAM thing, free forming your circuits and making them look cool in the process).
So I guess there really wasn’t much of a point to it- it was just an excuse to turn junk into cute little robots and make things that generally looked neat. A few companies like Solarbotics managed to make a business out of selling professionally made kits to build “BEAM” style robots. Most of it wasn’t very remarkable, but they were fun to build and moderately interesting to watch.
Today I doubt anyone would get much of a kick out of it. Keep in mind that this stuff was “interesting” way back before we had things like the Lego Mindstorms (the original yellow brick RCX Hitachi H8 powered unit), the Arduino, etc. At that time, a basic stamp was considered pretty heavy stuff. All the components you ever dealt with were through-hole only, so a lot of BEAM stuff “seemed” relatively advanced compared to everything else. Today, they’re basically just dumb robots hardwired to do one or two tasks with minimal components, and that’s it.
-SC
I miss BEAM robotics. Mostly because they were usually self-powering and the more advanced ones had some self-preservation built in.
I really think that more electronics projects should do the same.
With BEAM Robots you learn the Electronic Basic’s.
I build some of these Robots.
A simple Photovore http://youtu.be/tvguwCv2YqA
and a 4Leg Walker http://youtu.be/N4Jdb-_PKB4
It looks easier than it is and you are very proud if it works.
Programmable robots are mostly boring
It actually does not use a Miller SE, it uses the Picaxe as a solar engine. I built it for the simple enjoyment of making.
I am glad to see BEAM continuing. I think there is a rich field of experimenting where beam ground-up robotics meets sky-down CPU control.
After all, your brain doesn’t devote a lot of compute cycles to things like balance, pupil contraction and response to sharp pain — that’s taken care of by low-level processing in the nerves and spinal column.
A smart bot with beam bits seems like a great mix of technologies.
I love those motors, I manged to snag a bunch of them on sale at BGMicro.