Gosh, the fun we had when digital calculators became affordable enough that mere grade school students could bring one to class. The discovery that the numbers could be construed as the letters of various dirty words when viewed upside down was the source of endless mirth. They were simpler times.
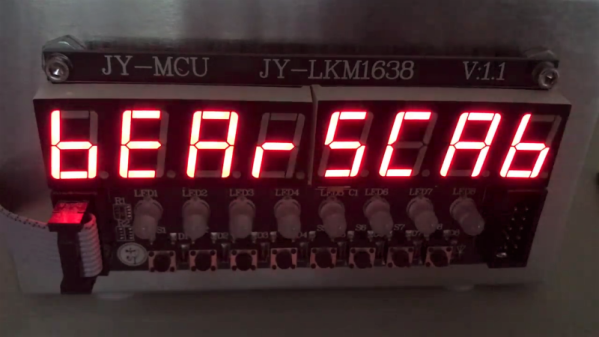
This four-letter-word “clock” aims to recreate that whimsical time a bit, except with full control over the seven-segment displays and no need to look at it upside down. This descends from a word clock [WhiskeyTangoHotel] made previously and relies on a library of over 1000 four-letter words that can be reasonably displayed using seven-segment displays, most of them SFW but some mildly not. A PICAXE is used to select two of the four-letter words to display every second or so, making this a clock only by the loosest of definitions. Word selection is pseudorandom, seeded by noise from a floating ADC pin, but some of the word pairings in the video below seem to belie a non-random sense of humor. As is, there are over a million pairings possible; it might be fun to add in the full set of two- and three-letter words as well and see what sort of merriment ensues.
While we like the Back to the Future vibe here, we’ve seen some other really nice word clocks lately. There was the one that used PCBs as the mask for the characters, and then a rear-projection word clock that really looks great.
Continue reading “Random Word Pairings Mark The Time On This Unusual Clock”