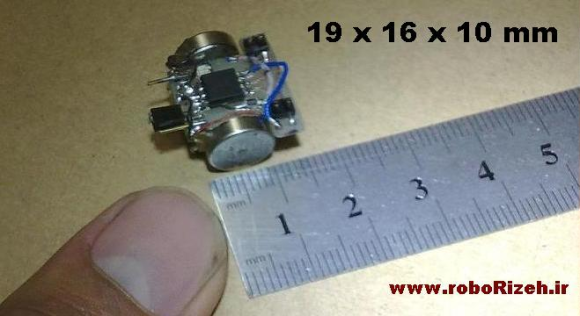
Building line following robots is fun and easy. Building a line-follower that is this tiny is a different story. The surprising thing for us is that despite how it looks, this robot whose name is Rizeh doesn’t use wheels to get around. [Naghi Sotoudeh] built the line-follower using two vibrating motors, with needles (not shown above) making three points of contact with the ground.
His website is a little sparse, but hit the downloads page to get a PDF file that serves as the build log. We also downloaded the 32 second demo video which is worth it. The magic-marker track that the bot is circumnavigating isn’t any bigger than the palm of your hand!
Onboard the diy PCB you’ll find two GP2S04 IR reflectance sensors which detect the black line on a white paper. The power-up sequence spends a few seconds calibrating these sensors. Speaking of power, [Naghi] went with a lithium polymer cell from a Bluetooth headset. At the heart of it all is an ATtiny45 which uses its hardware PWM capabilities to drive the two motors.
Of course line-followers rank up there with self-balancers as our favorite robot projects. But by far the ones we love the most are the speed-run maze solvers.














The PDF is infected with trojan.
Looks clean to me.
https://www.virustotal.com/en/file/861568f9309cbd82047f6246ed23974d40432e40534f8e822085d6761abc382c/analysis/1389844854/
VirusTotal says it’s clean.
I’m thinking an ATTINY 85 instead if a 45 and then use one of those optical mouse sensors like was mentioned last week right here on Hackaday.. Then you could use maybe any width line. Just a thought.
You should be able to use any width line anyway, as long as it’s not wider than the space between the sensors.
He also posted the bot at http://letsmakerobots.com/node/39864
Fishy website – consider posting a warning on the writeup?
I downloaded one of the videos, it was only 10mb in size. While the website was open in a tab, our company’s Squid proxy logged me sending more than 1.4GB of traffic to robotrizeh.ir
Firing up wireshark to dig deeper…
He also full posted the bot at:
http://www.instructables.com/id/How-to-make-worlds-smallest-line-follower-robot-ro/
full data and also nice video
Combine it with the mouse-cam hack from yesterday…?
From my initial look at the photo, I thought he was using button cells for the power source AND wheels!
Hah that would actually be quite cool :3
What iran wishes for America should befall iran – in spades.
And vice-versa. Only fair.
Yes, currently it’s one way against Iran.
Nitpick mode: s/Miniscule/Minuscule/
i need the circuit diagram of this line following robot