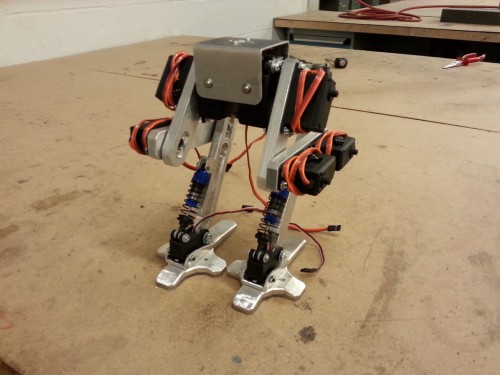
[Ye Guan] has always been fascinated by walking robots — so he decided to build his own. It’s called Project Sentinel, and he’s loosely based the design off of the Sentinel Walker from Warhammer 40K, and the two-legged AT-AT walker from Star Wars.
Both of these robots are based off of a bird’s walking style. Scientifically this is called the digitgrade walking style, which means they stand and walk on their digits (toes) — this typically allows them to move more quickly and quietly than most other animals.
[Ye] has managed to achieve this for his project using 8 servo motors, balancing the center of mass directly above the feet. Think about it like a reverse pendulum, which is supported by the servos torque and balanced by a gyroscope. He plans to have it fully autonomous with sensor feedback.
It’s not done yet, but he’s already released all the CAD files and a nice build log for anyone to attempt it themselves — we’re excited to see the final product. Just take a look at it walking in place after the break!
[via HackedGadgets]














Two legged walker from Star Wars was AT-ST. AT-AT has four legs :)
Damn you beat me to it.
I would love to buy a kit for this when finished if not too expensive!
You mean AT-ST not AT-AT.
I like the design, but those servos don’t seem to be moving smooth enough for it to not fall over. Hopefully it’s just a coding issue and not a hardware one.
Thank you for making a comment about the actual device and not being a nit picking neophyte about the star wars reference.
Besides the foot design reminds me more of an Eddie from robocop.
Sorry for having fun I forgot this is hackaday where there is no fun allowed under any circumstances
Awww…. c’mon. These are just the enthusiastic hackers taking a shot at it and others commenting flippantly with a big huge grin about it all. It’s generally all supportive.
There’s real serious ppl working on the real thing. It’ll be released once they kinda maybe trust it.
you act as if I had any control over this forum. And obviously didn’t get me ignoring my own comment when I mentioned the Eddie. Man subtlety is just lost on you isn’t it?
One does not simply misquote Star Wars and get away with it on HaD.
ok, i’ll grant you that one. point conceded.
meh. it’s just a test. it will take some fancy code to make it work though. i’m thinking he’s gonna need to control the articulation at the ankle. looks damn cool. :)
Looks like he just has an RC receiver hooked up to the servos and probably is just controlling it with an RC transmitter. So maybe the stick movements aren’t smooth or something.
Need a variable PWM power supply for the motors but i guess he is using direct DC for testing right now.
Ah, so cute, it’s a baby ED-209, but you better be careful, he gets kind on mean in his teenage years.
http://www.youtube.com/watch?v=A9l9wxGFl4k
It’s just a glitch!
it’s not a glitch! it’s a feature ;))
In case of problems: Run down the stairs.
so the video shows what? a servo sequencer working, nothing else.
Yep was about to say the same. Looks exactly like ed 209 ;) Just print some casing + add 2 airsoft shooters and done…
looks pretttty cool.
I was thinking Stormcrow. Mount a couple of med lasers, machine guns and a Streak SRM-6.
No one else saw a Locust finally about to bust out of the inner sphere? Shame..
I went larger. Marauder or Catapult maybe.
It needs to have some left/right rotation at the hips, or it will only be able to turn by coming to a complete stop and doing an awkward unstable shuffle.
Also reminded me of ED-209 right away.
the turning is in the feet
Your right – won’t turn as it is currently configured.
is that from the ministry of silly walking robots?
Where does the railgun go?
I have a few constructive comments about this design based off what you plan on doing to finish the project. First, instead of you using pressure sensors to ensure the feet are on the floor you could use a ir led and phototransistor which would probable save money and space and you could fit more sensors on there by just milling out spots for them. Second you mentioned about using ball bearings or nylon washer for the joints of the legs. You may be able to use CD player or DVD player motors with a h-bridge setup, I’m not entirely sure if that will provide enough torque though. Then thirdly based of a comment left earlier you could use servos to make the legs pivot therefor making it be able to turn easier. Hope this helped out if at all.