[Patrick McCabe] is a student at MIT and for his final project in his Microcomputer Project Laboratory course he decided to build a clever Connect 4 Robot.
The only criteria for the project was that you have to use the Cypress PSOC 5LP kit along with a 8051 micro-controller or equivalent (programmed in the same assembly language as the PSOC). All in all, [Patrick] had 5 weeks to work on the project.
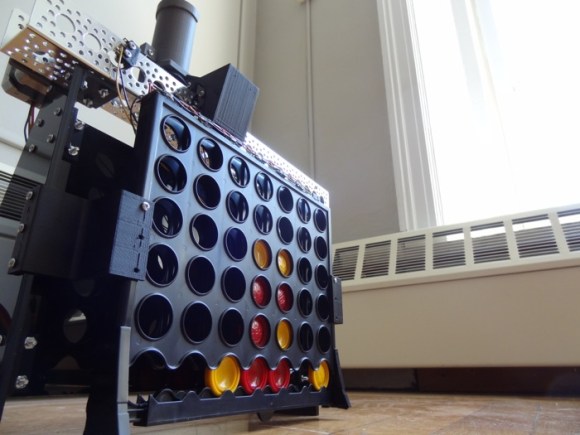
He’s using a regular old Connect 4 game along with an assortment of custom parts. A stepper motor drives the token carriage back and forth across a 15″ aluminum channel using a timing belt. A servo releases the tokens, and all the other components, brackets, and other pieces were either made with his very own UP Mini 3D printer, or out of acrylic using the school’s laser cutter. It’s an extremely clean and well thought out build, and he’s actually uploaded all the custom part files (in SolidWorks format) online, for others to build their own.
It’s pretty quick, too!














Very cool! Extremely polished!
My friend Joe and I built something very like this when I was an undergrad in 2005 which used a laptop and a webcam to detect board state (and cheating!) and then taunt opponents and such through the speakers, but it had no mechanism for actually making moves – we had it announce where it wanted to move.
This new version is way more sophisticated!
Why would a modern eduction require students to use 8051 crap ?
. . . because understanding the complex inner-workings of a thing makes one a better engineer. As for the 8051, it is one of the most widely used uC families in the world with a legacy such that those who designed the curriculum probably had 1st hand experience with the thing. I too used to pan the 8051 but have gone through several design cycles with ’em and am a fan, depending upon the application.
They could learn the inner workings of an ARM. Same kind of idea, but more useful.
You’re missing the point: the goal is for students to learn *how you learn the inner workings*. Architectures come and go, and like any technical field a huge portion of the practical specifics you learn in college will be obsolete by the time you graduate if they weren’t already by the time you started.
The 8051 is a classic workhorse, but it’s the PSoC wrapped around it that makes this interesting…
http://www.cypress.com/psoc/?source=CY-ENG-HEADER
It’s too bad that Connect Four is a solved game.
THE ONLY WINNING MOVE IS NOT TO PLAY.
That’s actually why I like playing Connect Four with my kids. It forces them to slow down and pay attention or they *will* lose, because Daddy doesn’t throw games. I especially like the taunting feature. ;)
This is pretty impressive! I also like to play Connect 4 with my kids to help them learn to pay attention and observe what’s happening along the way. When they win, they earn it.