[Patrick McCabe] is a student at MIT and for his final project in his Microcomputer Project Laboratory course he decided to build a clever Connect 4 Robot.
The only criteria for the project was that you have to use the Cypress PSOC 5LP kit along with a 8051 micro-controller or equivalent (programmed in the same assembly language as the PSOC). All in all, [Patrick] had 5 weeks to work on the project.
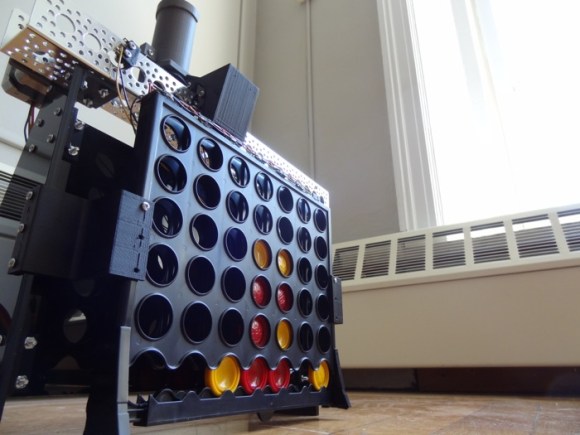
He’s using a regular old Connect 4 game along with an assortment of custom parts. A stepper motor drives the token carriage back and forth across a 15″ aluminum channel using a timing belt. A servo releases the tokens, and all the other components, brackets, and other pieces were either made with his very own UP Mini 3D printer, or out of acrylic using the school’s laser cutter. It’s an extremely clean and well thought out build, and he’s actually uploaded all the custom part files (in SolidWorks format) online, for others to build their own.
Continue reading “Connect 4 Robot Taunts You Before Kicking Your Butt”









