When robots take over the earth, it will be important that they maneuver across various types of terrain quickly and effectively. Bipedal motion is a tricky feat to accomplish for machines, so [Carter Hurd] decided, why not invent a better wheel? Even wheels can be improved, right?
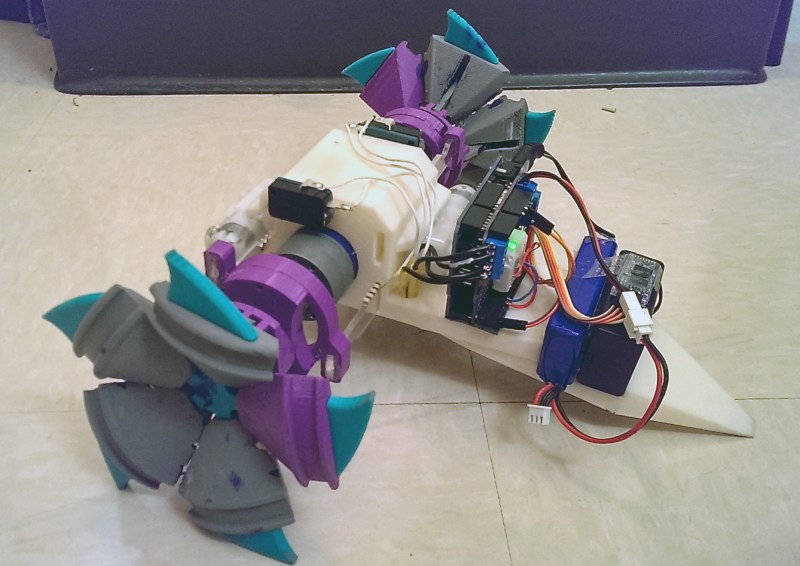
Making excellent use of the prototyping capabilities of a 3D printer, [Carter] designed a set of bulb-shaped mechanisms which act effectively to drive themselves around on a smooth surface. The bulb is split radially into a series of wedge slices which can articulate outward, transforming the robot into something of a spiky razor-beast, able to tear through piles of fall leaves or wakes of loose sand. In order to unfurl itself however, the shaft driving the central mounting plate of the wedges has to fight the robot’s own weight. To solves this, [Carter] modified his design so that the rest of the wedges would unfold around the one supporting the load, the wheels would then rotate to shift the weight, allowing the last piece to extend.
[Carter] shows a proof of concept from earlier this year, explaining his hinge design which stretches a tendon-like connector in order to tension the wedges in one state or the other. Since then it looks like his transforming wheel has evolved a bit. You can get a better view of his robot in action here :














I guess you could say, he really reinvented the wheel here…
Initially thought of the skateboard wheels from the novel Snow Crash. I just googled that and it seems that someone has created an animation of how that would work.
https://www.youtube.com/watch?v=Nh-36rbn-ug
ditto. Nice animation, enjoyed that book, the fanciful smart wheels went right on my birthday list.
Is that not just a horribly expensive, failure prone version of a tank tread?
In the novel those individual legs would extend and contract so that the wheel’s hub would always remain stable, no matter what the road surface is like.
Reinvent the wheel!? You can’t reinvent the wheel, that’s sacrilege! But those would make some kick ass snow tires.
Would it? I think it lacks the surface area for it to stay on top of the snow, it would probably just carve the snow until it can’t move anymore.
Making a tire work on a given surface is almost always a tradeoff. For dry pavement you want as much contact area as possible, but for wet surfaces you need channels to allow water to be moved out of the way. For dirt you want knobby, but for roads you want smooth. For ice you want studs, but everything else that’s counterproductive.
Sidenote: I am sooooo tired of the “robots take over the earth” meme. Even in the movies the problem is never the AI itself, it’s what the AI was hooked up to. Anyone who hooks a self-modifying program up to a two-way data line, let alone nuclear missiles, deserves what they get.
Yes- because outdoor environments are so varied, the idea wheel is super varied as well. That’s why the spikes on the wheel in “outdoor mode” are swappable. I already made “paddle wheel” shaped ones that seem to work better in the sand. Metal studs are coming up in the future.
Snow tires are meant to do exactly that. They’re not *supposed* to stay on top of the snow.
Depends on the role of the vehicle.
If it’s gonna run in areas where the depth to hard pack (road, ice, gravel, &c) is expected to be less than the ground clearance of the vehicle. Then yes, you want to sink down and get maximum traction on that surface.
If that depth is much greater than your ground clearance you get better performance(at least fuel economy) staying on top, like with snow cats and desert off-road vehicles.
I’m not sure of your point of view on this matter, but what I’m trying to point out is how *thin* those “wheels” are. Once it carves in deep snow I’m not sure how it would be able to move forward. Besides, snow tires still have enough thickness/width that it gives traction, while this wheel does not.
When you have a solid contact underneath mud/snow you want high ground pressure and high clearance so you sink in and grab that rather than waste power fighting muck.
Think farm tractors with high, narrow wheels, and aggressive tread.
If you are low clearance or do not have predictable solid contact it’s best to have low ground pressure and stay on top of the surface. Such as tracks or multiple axles/duallies
Also, I think the driver of this car listened to what you had to say. Poor car. http://g35driver.com/forums/attachments/g35-coupe-v35-2003-07/102622d1236226386-why-they-invented-snow-tires-img_0153.jpg
Excellent, Creative thinking and hard work on prototype. congrats.
Agreed. This is awesome.
Same here. However, wouldn’t it work a little better with something other than the tail that literally drags the unit (creating more resistance). Perhaps an omni wheel or roller?
Okay sorry–back to the subject…the transforming wheels are pretty slick. ;)
Guy needs to make the wheel transition “on the fly”
Being an intuitive, self taught with a smattering of ignorance
about many things,
I lack the vocabulary to explain why, but the avalanche/landslide analysts
will be a good place to start looking for that dialogue.
The final drive gear ratio will need to be addressed when that wheel roughly doubles in diameter.
The additional ground clearance should help, but now watch out for that center of gravity/mass shift.
As for the snow tire vs road tire concern:
Yes, personaly I’m very much a fan of the tall and narrow tire
when on a hard surface that’s covered with the traction problem.
But sometimes you need to a way to Not break through the muck
lest you just sink to your chassis and sit there with wheels spinning
leaves you about as useful as a turtle on its back then.
It actually can transition on the fly (at least opening, without any added weight)
“Being an intuitive, self taught with a smattering of ignorance
about many things” – which includes flash I see :P
Flash is almost obsolete – HTML5 does *almost* everything ActionScript does, with less CPU usage. While Flash is still king with stage3D versus WebGL (HTML5) for hardware optimization, Flash still doesn’t work on most mobile devices without manual installation (loves to drain batteries!) Flash does still have better asset/file management (1 .SWF file) and slick visual authoring, but mobile browsers are very important these days — it’s best to cater to both desktop AND mobile users in a single blow without having to port your game/app/whatever from one to the other.
Overall, Flash is still pretty good, but it’s quickly dying out since you have to purchase Flash Studio, where for HTML5 (Canvas element, JS, etc) you don’t have to buy or lease a single application to get started.
Is this some sort of poem? I can’t tell
This is how I imagine the screamers in the novel “Second Variety”.
LOL – I can see that! Ouch
This is one of those projects that would probably get a lot more recognition if there wasn’t that group that’s annoyed by animated gifs. this project is super cool! I’d really like to make it.
https://www.youtube.com/watch?v=C2niobAFav4
tyco did it already
Incredible. It’s the same idea but a slightly different implementation.
Their design uses rigid ‘petals’. The creator says the force needed to accomplish this for larger vehicles quickly becomes impractical.
Totally reminds me of this toy from the 80s:
https://www.youtube.com/watch?v=-IRCaE3ks6Y
Yes! The animal! This wheel’s “claws” can be deployed at will though – whereas the animal’s popped out due to spring/cam action whenever the torque got too high.
The stinkin’ spring/cam action broke on me eventually…but that thing went through hell and back!
Yep, that’s exactly what came to mind when I saw this post! (I had one, too.) Excellent reference!
I think you mean “Bipedal motion is a tricky feet to accomplish.”
-,-
ba dum
=D Yes, you’re right…
I HAD THE AMINAL!
also the rattler, which was like the honey badger of RC cars.
https://www.youtube.com/watch?v=smAn086Wvqk
It needs some soft grippy stuff in the circumferential channels that it runs on when the wheels are closed.
Nice observation! That’s what the channels are there for. The urethane rubber that I molded and originally glued in fell out. There are better ways to do that, but I was lazy and tried to just use glue first..
id have thought making it transition while moving would remove the need for the passive eliment, bit like steering a car with no power steering, gets a lot easier with a little movement. provided ofcourse there is a little give in the mechanism
This is dumb. There are much better “transforming” or shape morphing wheels out there.