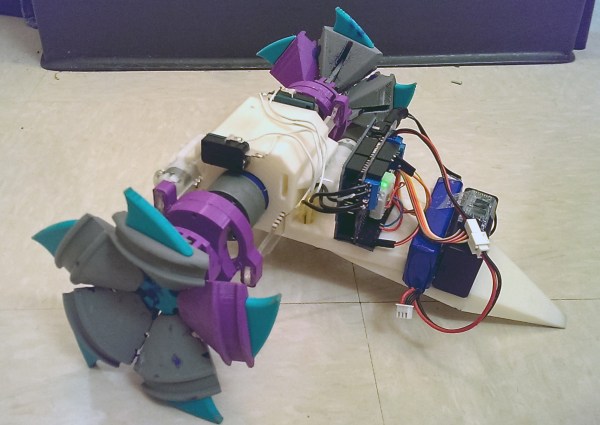
Out of the thousands of constraints and design decisions to consider when building a robot, the way it moves is perhaps one of the most fundamental. The method of movement constrains the design and use case for the robot perhaps more than any other parameter. A team of researchers at Texas A&M led by [Kiju Lee] is trying to have their cake and eat it too by building a robot with wheels that transform into legs, known as a-WaLTR (Adaptable Wheel-and-Leg Transformable Robot).
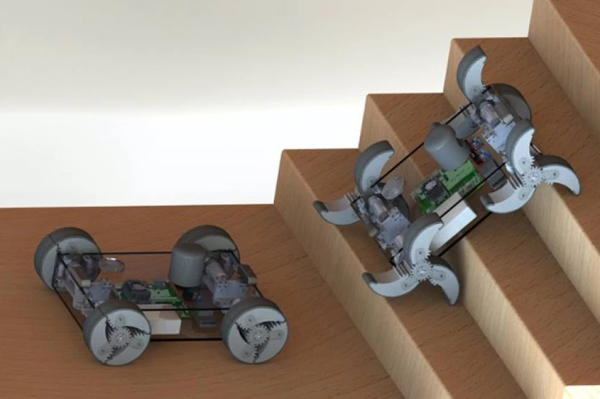
a-WaLTR was designed to conquer one of wheeled robots’ biggest obstacles: stairs. By adding a bit of smarts to determine whether a given terrain is better handled by wheels or legs, a-WaLTR can convert its segmented wheels into simple legs. Rather than implemented complex and error-prone articulated legs, the team stuck with robust appendages that remind us a little of whegs.
The team will show off their prototype at DARPA OFFSET Sprint-5 in February 2021, which is a program focused on building robots that can form adaptive human-swarm teams.
Thanks to the rise of 3D printers and hobbyist electronics there are more open-source experimental robot designs than ever. We’ve seen smaller versions of the famous Boston Dynamics’ Spot as well as simpler quadruped bots with more servos. a-WaLTR isn’t the first transforming robot we’ve seen, but we’re looking forward to seeing more unique takes on robotic locomotion in the future.
Thanks to [Qes] for sending this one in!