It’s mind boggling how much e-waste we throw out. Perfectly good components, mass produced for pennies. And at the end of their life, going straight to a landfill or some poor country to be melted down. Don’t you wish you could help?
Stepper motors are a dime a dozen when it comes to e-waste, and there’s tons of cool projects you can do with a stepper motor — [Madivak] is just starting on a robot arm design over at Hackaday.io that makes use of recycled components.
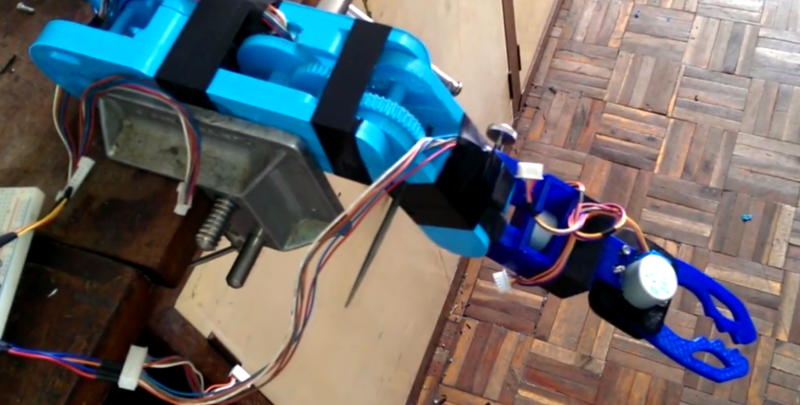
It’s fairly early in development, but that means it’s a great time to start following it on the project site. The robotic arm is being designed for his final year project in his undergrad degree. Besides the steppers, he’s using his school’s Utilimaker 3D printer to manufacture all of the other mechanical components with control coming from DRV8825 stepper drivers and the Freescale Freedom KL25Z dev kit. Check out the clips after the break to see current state of the build.
There’s tons of free robot arm designs out there, so the question is — why haven’t you built one yet?














Recycled stepper motors?
Mmmmmmh… Where?
In the shoulder and in the elbow joints which were covered in tape.
Albeit, it is not like they showed it being assembled int eh videos posted here… there is likely more info elsewhere.
OOooH… Now i see. Thank you!
Recycled from his professor/ spare motors box in school.
Printers and scanners for the obvious choices. You’re looking for paper tray select mechanisms and the bit that keeps the print head clean rather than the feed rollers and head drive – they’re usually DC motors. Also check out auto parts. Many steppers to be found in a modern car – headlight aim, engine management, air conditioning flaps for example. Modern domestic machines will have some too, e.g. water flow actuators in washing machines are no longer just solenoids.
…why haven’t you built one yet?
Already done, 15 years ago, also recycled parts where used.
Awesome, definitely on my list of things to do… 10 years down the road
Nice build… but flawed due to a major oversight.
I don’t see any worm gears.
Without worm gears, the arm is entirely reliant on the motor being energized at all times to maintain its position.
Remove the power to the motor and the arm will immediately drop due to gravity.
When worm gears are used, one simply sends a series of pulses to the stepper motor until the desired position is achieved, then the power can be removed, and the arm will remain in this position until another series of pulses are sent to reposition the motor.
Worm gears are the diodes of mechanical engineering.
Even better would be 3D-printed harmonic drives. They self-lock like worm drives, but they pack a much higher reduction ratio in a given volume.
They would go well with DC brush motors (which are likely even more prevalent in e-waste than steppers) and closed-loop (servo) drives.