[Geir] has created a pretty neat device, it’s actually his second version of an autonomous boat that maps the depths of lakes and ponds. He calls it the Sea Rendering. The project is pretty serious as the hull was specially made of fiberglass. The propulsion is a simple DC motor and the rudder is powered by an RC servo. A light and flag adorn the top deck making the small craft visible to other larger boats that may be passing by. Seven batteries are responsible for all of the power requirements.

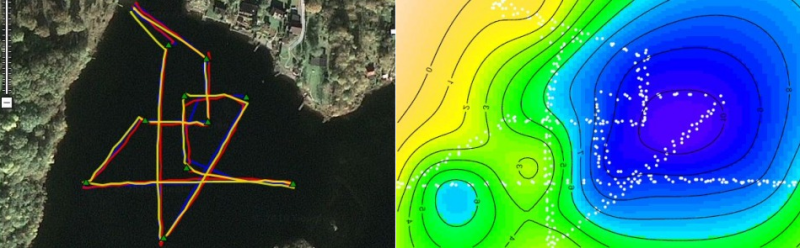
The craft’s course is pre-programmed in Mission Planner and uses ArduPilot loaded on an Arduino to steer to the defined way points. An onboard GPS module determines the position of the boat while a transducer measures the depth of the water. Both position and depth values are then saved to an SD card. Those values can later be imported into a software called Dr Depth that generates a topographic map of the water-covered floor.
[Geir] has sent this bad boy out on an 18 km journey passing through 337 way points. That’s pretty impressive! He estimates that the expected run time is 24 hours at a top speed of 3 km/h, meaning it could potentially travel 72 km on a single charge while taking 700 depth measurements during the voyage.














In a word: Impressive.
This is awesome.
Very impressive. I want one. Now. :)
Anyone find the part number of the depth transducer used?
NMEA-0183-DST800-Transducer-Plastic-DST800PV-S-6422
from:
http://www.blueheronmarine.com/
100 meter grid is interesting, but a tight 1 meter grid could be even more interesting. You would really need powerful motors and Differential GPS tracking but I’m thinking of the search for the “Great Bell of Dhammazedi”, or possibly other antiquities lost along coastlines around the world. It would be a much trickier endeavour, but it could be rewarding.
It looks like the location of the “Great Bell of Dhammazedi” is now known, still the idea is a powerful one that could be very useful.
Depending on the waterway in question you’d need some collision sensors and ColRegs like those being developed at the MIT AUV lab.
It may be possible to kludge together a D-GPS from 2 consumer grade GPS and a directional wireless connection to a base station. Getting that setup waterproof AND self-tracking would be a minor feat in itself though.
If you’re lucky you could read from the NDGPS beacons maintained by the US Coastguard.
I think a bigger limit on resolution is the angle of the transducer beam.
Maybe a UAV, which measures the distance to the surface as well as to the sea bed. But then getting the latitude and longitude coordinates under what is in effect a Faraday cage would not be so easy. Solve one problem make two more.
UUV, not UAV – DOH
For imaging you want something like “side scan sonar” where the ultrasonic beam sweeps a much larger area to the side(s) of the vessel – not point by point measurements like I assume this project does.
I wonder how feasible a mesh neteork of these things would be. Perhaps communicating via ulf maybe via a floating hub to remove the need for tethering.
Poor a skip full of them into Loch Ness. Maybe teach them how to come back to the hub and recharge. Maybe inductively or proximity if out at sea.
And this was done in 2010.. 5 years ago, that just makes it more impressive :)
Here is a updated version, still 2010 thou;
http://letsmakerobots.com/robot/project/whirligig-revisited
Maybe they could use solar panels instead of having to return for recharging.
Have a great evening! :)
Look at this commercial autonomous swimming bot and get inspiration. Wavepowered propulsion, networked, solar powered payload…
Neat project! Better watch out for these guys though… https://www.youtube.com/watch?v=rDQ8IhDB5jM
Jeff, Do you do this? I’m part of the IRCWCC. I was going to put up a post of a video. USS Yorktown aircraft carrier would be a great base hull for this.
Some one get this to the Army Corps of Engineers… that bunch could use the help.
This is what I dreamed of. Actually this is more than that.
I wanted the electronics of this thing responsible for mapping installed on my boat. So everywhere I go I do not just waste my fuel, but constantly contribute data to the depth map.