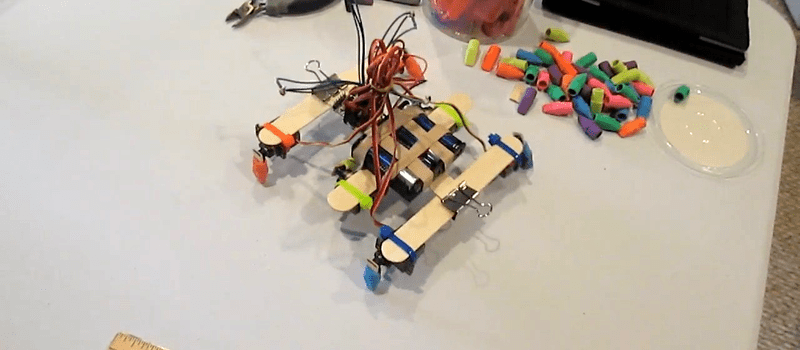
We all have reasons why we’re not building cool robots. “I don’t have a lasercutter.” “I don’t have a 3D printer.” [JAC_101]’s hexapod robot dances all over your excuses with its tongue-depressor body and pencil-eraser feet!
Some folks like to agonize over designs, optimizing this and tweaking that on the blackboard. Other folks just build stuff and see what works. If you’re in the mood for some of the latter, check out some of the techniques at work here. Tongue depressors make a simple frame, and servos are lashed on with zip ties in place of fancy servo mounts (or hot glue). Photoresistors are soldered directly to their load resistors, making a simple light sensor. It’s all very accessible and brutally minimalistic, but it seems to walk. (Check out the video, below.)
Arduino code is available for you to play with, naturally.
There are other X-apods (where X is a small integer) you can build on for not much more than the cost of the hobby servos involved. [Radomir Dopieralski]’s Tote springs to mind. If you’re more into grippy arms, the MeArm has you covered. (Why has nobody combined these?!?!?) If two legs will suffice, try out a BOB derivative: either in minimalist garb or something fancier. Whatever flavor you choose, just get building. Leave your excuses for another day.














Hmmm, nice piece of minimalism there, the dance timing reminds me of a snippet of late 70’s early 80’s pop music, any ideas what its close to ?
Darude – Sandstorm.
The link to the build is
http://wiki.lvl1.org/Office_Supplies_Hexapod
Zip-ties and bulldog clips. Sounds very similar to some of the first 3d printer designs!
People are still selling ‘3d printers’ made of such materials, often for thousands of dollars and aimed at education market.
This is the world we live in. :(
Two years back the school I work for bought a MendelMax 1.5 kit for 700USD that included zipties but told us to supply our own bulldog clips.
it could have been better with 2 more servos with their horns ziptied to the clips so the front and back cross arms could tilt. this would allow for a more fluid walking motion.
This works better and it more solidly assembled than **A LOT** of robots that are actually published in IEEE papers.