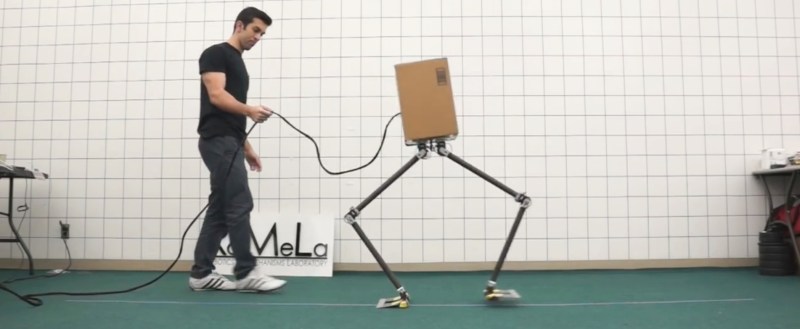
We humans walk funny. Pivoting one leg forward at the hip creates an offset that puts us off-balance sideways. We have to compensate for this with each step we take. Many robots handle this by instead taking small, calculated steps. Enter NABiRoS, the Non Anthropomorphic Bipedal Robot System (link to the video below). The ‘Non Anthropomorphic’ means that it doesn’t walk like a human, and yet the ‘Bipedal’ means it still walks on two legs. The difference is that it walks sideways.

Here’s how the folks from RoMeLa (Robotics & Mechanisms Laboratory) at UCLA did it. Imagine you rotated both your legs 90 degrees such that they were facing in opposite directions. Then you rotate your upper body 90 degrees to face one of your legs. You can now move your legs to walk in the direction you’re facing and there’ll be no more tilting sideways each time you take a step. The joints are also simpler as only a single degree of freedom is needed in each of the knee and hip joints. The ankles and feet are done with a compliant, or an elastic, joint much as you see with a lot of prosthetic legs. As you can see in the video below, in addition to walking, they can do some surprisingly active things such as hopping up and down and what we can only call skipping. In fact, the result is sometimes very human.
So far they’ve achieved a walking speed of 0.46 miles per hour (0.75 km/h). We’re not sure how they plan on turning yet, but they’re working on it and hopefully we’ll see it in their next version. At the end of the video they give some brief glimpses of their follow-up work and it looks very interesting. This lack of tilting also means they’ll avoid a lot of the falling we’ve seen in past DARPA competitions.
For an even kookier RoMeLa bot, check out this one that floats as it walks!
[via IEEE Spectrum]














omg it looks hilarious and cute
Nice approach!
Couldn’t help seeing dr Zoidberg in this, just missing the whoop, whoop whoop sound..
He’s sand-crabbing away! Get him!
I miss that show a lot…
They’ll have to build lateral stabilization back into it because even though the joints allow linear/planar motion, turning and uneven terrain can’t be avoided; also the rotating knee joint would require a split foot that they haven’t used.
The cute factor is huge though.
Walking as a controlled fall.
Isn’t our walking a controlled fall too? Or is that just when going down stairs?
https://www.youtube.com/watch?v=Cv6tuzHUuuk
Cute, but it will be tripping over its own feet when it tries to run. Maybe three legs – two hind legs outside, a single front leg centered. Then an overlap while running is possible without loosing lateral symmetry. Big dog mates with the Festo kangaroo.
Drat, that sounds like another project to add to my unending list…
So me and this bot have something in command…I too walk sideways (not oft lol)
dang it i meant common…
It’s kind of like a crab walker, but with two legs. Interesting. And extremely cute.
This is really cool. As a fencer I’m a little upset that I this never occurred to me as this is very close to what we “mimic” with our footwork. It increases stability and also reduces the time required to stop when mooving at high speeds.