
Did you know that most of the current advances in desktop consumer 3D printing can be traced back to a rather unknown project started in 2005? This little-known RepRap project was dedicated to building Open Source hardware that was self-replicating by design. Before the great mindless consumerization of 3D printing began, the RepRap project was the greatest hope for Open Source hardware, and a sea change in what manufacturing could be.
While the RepRap project still lives on in companies like Lulzbot, Prusa, SeeMeCNC, and others, the vast community dedicated to creating Open Hardware for desktop manufacturing has somehow morphed into YouTube channels that feature 3D printed lions, 3D printed Pokemon, and a distinct lack of 3D printed combs. Still, though, there are people out there contributing to the effort.
[Nick Seward] is famous in the world of RepRap. He designed the RepRap GUS Simpson, an experimental 3D printer that is able to print all of its components inside its own build volume. The related LISA Simpson is an elegant machine that is unlike any other delta robot we’ve seen. He’s experimented with Core XZ machines for years now — a design that is only now appearing on AliBaba from random Chinese manufacturers. In short, [Nick Seward] is one of the greats of the RepRap project.
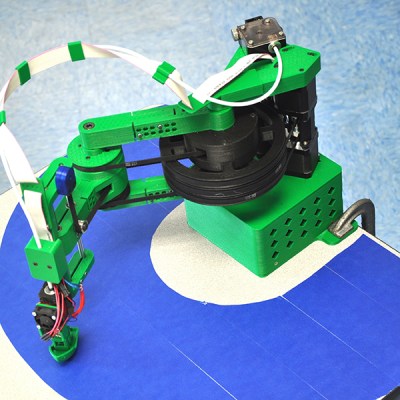 [Nick] is designing a new kind of RepRap, and he’s entered it in the Hackaday Prize. It can print most of its own component parts, it has an enormous build volume, and it’s unlike any 3D printer you’ve seen before. It’s a SCARA — not a, ‘robotic arm’ because SCARA is an acronym for Selective Compliance Articulated Robot Arm — that puts all the motors in the non-moving portion of the base. Its design is inspired by the RepRap Morgan, a printer whose designer won $20,000 in the GADA prize for being mostly self-replicating.
[Nick] is designing a new kind of RepRap, and he’s entered it in the Hackaday Prize. It can print most of its own component parts, it has an enormous build volume, and it’s unlike any 3D printer you’ve seen before. It’s a SCARA — not a, ‘robotic arm’ because SCARA is an acronym for Selective Compliance Articulated Robot Arm — that puts all the motors in the non-moving portion of the base. Its design is inspired by the RepRap Morgan, a printer whose designer won $20,000 in the GADA prize for being mostly self-replicating.
Improvements over the RepRap Morgan include a huge build volume (at least three 200x200mm squares can be placed in this printer’s build volume), a relatively fast print speed, high accuracy and precision, and auto bed leveling. Despite being more capable than some RepRap printers in some areas, the RepRap Helios should wind up being cheaper than most RepRap printers. It can also print most of its component parts, bringing us ever closer to a truly self-replicating machine.
You can check out a few of the videos of this printer in action below.
















I want one of these more than anything else ever on HAD. :)
He keeps apologizing about the quality, but it’s still better then the first print off most printers you can buy.
Surprised to see that this prints as precise as it does, thought the arm would wiggle too much. Good job Nick!
Fantastic, I want this soo bad! I was just picturing something like this with a plasma cutter attached. Great work
Something like this plasma cutting SCARA arm
I think in it’s current configuration the possible build height is a but short.
Z slide should be longer so that it can descend substantially below the bottom of the printer’s base, then the whole unit could just be sat on top of a suitable ad-hoc raised platform on top of the build surface, without needing the massive plastic base “built in”.
Think of a reception style desk, put the printer on the top whatever you call it, plinth, mantle, but the Z slide can reach down to the desk surface.
Great idea! The next design (v0.2) seems to dictate a minimum build height of 75mm-100mm before I do any extra elevation. This is good enough for most prints but it is easy enough to throw some extra blocks under the base to get an additional 75mm or so. (The one negative is that longer rails weight more and 8mm rails are already 77% heavier than the 6mm rails I use. People have been pushing me to use carbon fiber and it has been proven to work well on the Hypercube. I really want this printer to work well with old 3D printer components so maybe I will order some carbon fiber components and test them in parallel to the traditional 8mm rails.)
Is there any reason the Z motion doesn’t occur from the base of the arm? That’d allow for much greater flexibility in maximum Z height, and cut the end effector weight down by quite a bit.
I limited myself to only static stepper solutions. You would also need a pretty rigid solution. (Hard to do well with a plastic frame.) I haven’t complete discounted the idea. I like that form factor better but for now there is really no other way to keep the steppers stationary.
Ceiling mount, anybody?
This is how you get GLaDOS.
Do you want GLaDOS? ;)
Wait, Do you not?
That’s a pretty dang nifty solution to 3D printing.
Five Finger Fillet guy looks like Chris Pratt.
What is the blazes happened? WordPress again. :/
I’ve been watching this project with interest. Belts, pulleys and round *normal* bearings are far far cheaper that linear rails etc.
The catch is to get the kinematics right and that’s needs a bit more CPU horsepower than the normal 8-bitters used in Cartesian systems.
I am sure we could do this with 8-bit controllers but it is quite easy for the 32-bit controllers to handle this. There are now solutions for around $60 and many under $100.
You could probably do it with an 8-bitter and Asm but that takes far too much development time.
This one isn’t the hardest as it two intersecting arcs in a flat plane – the z axis does the rest. So it is series kinematics.
Parallel kinematics makes it harder. I have one that I am working on that is parallel kinematics with 3 lots of two intersecting arcs that converge to the end effector on a 3D space.
I would be interested to know what mechanism you are talking about.
https://cdn.hackaday.io/images/425381483269385086.jpg
https://hackaday.io/project/18186-arc-delta-3d-pcb-drill-and-other-failures
I think that this design would be well suited for educational institutions, because of its (hopefully) low price, and low space requirements.
You could just store it away in a small box, and mount it to an already available table when needed.
But from my experience, printing on a cold surface using blue tape is something that can drive a beginner crazy.
Not every brand of PLA sticks well to blue tape, and also you can’t get the right tape anywhere in the world.
An additional HPB, that can be attached to the base of the printer, would be nice.
But it would have to be so well insulated, that it doesn’t damage the table.
I can’t wait till the usual Chinese cloners get wind of this thing.
I’ve had really good luck with blue tape coated in gluestick. The only part that has driven me crazy with this was getting the thing to pop off! It sticks tight!
3d printing is just one of the uses, think about drawing, painting, laser cutting, pick and place… i do want this.
This look to be fairly water-jet (or laser) cutter friendly…would make the chinese clones even better…
Really? RepRap – A little known project? And on HaD? I remember RepRap being to desktop 3d printing what Kleenex is to snot rags!
Maybe I am getting too old already.
Very cool design. What do you think you can print the pieces for? I would suspect under $40. If that is the case you could sell a kit with the plastic pieces that would use the parts from one of the Tronxy kits you can get for about $150. The extruder is different. If you could figure out how to use the kit electronics, motors, acne screws, linear bearings, rails, belts, and power supply, you might get the cost down to the $200 range. That would be very cool.
I have been pondering making a little engraving CNC machine and it is looking to be less expensive to buy one of the TronXY kits for it’s parts than to start from scratch.
As an aside, if you could get enough orders for the plastic parts it might make sense to look into getting them injection molded. People could either print the pieces or buy injection molded ones. My guess is that the injection molded ones would be nicer and less expensive.
It uses less than 1kg of plastic so it is cheap if you have your own printer. Injection molding will be a trick. If the mold cost was only $1000 for each unique part then you would have to have quantities in the range of 10000 to make it make sense.
I dunno what the low end of Chinese injection molding is, but I do know once you are set up, they can crank the pieces out very quickly and for very low cost. I look at is like publishing a book and having people print it on their dot matrix printers. Yes you can do it, but the quality is not that super, it takes a long time, and it costs more, compared to getting it offset printed, But the offset printing has that initial start up cost. It would be amazing to see a machine with those capabilities selling for in the $200 price range though, and that does not seem impossible.
I would give it 5 years but I think we can get there.
Would a curved heated bed be necessary?