Seven segment displays and Nixies are one thing, but the king of all antique display technologies must be electromechanical flip dots. These displays, usually found in train stations or rarely on old bus lines, are an array of physical disks, black on one side, light on the other, that ‘flip’ back and forth with the help of an electromagnet. They’re expensive and impressive, driving them is a pain, but oh man do they look awesome.
While flip dot displays can be bought new if you know where to look, [sjm4306] had the idea to build his own out of inexpensive materials. It might just be a prototype, but we’re saying he’s succeeded. He has the workings of a seven flip-segment display, and the techniques he’s using mean it shouldn’t be too expensive to build your own.
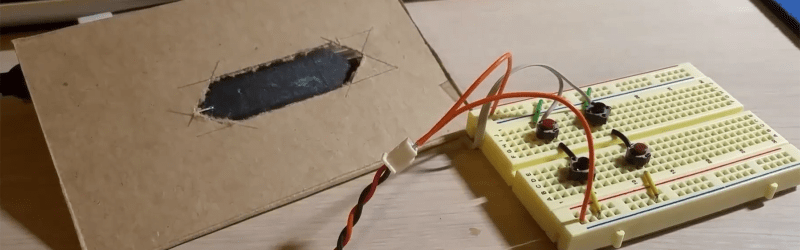
Instead of building a matrix of flip dots, [sjm] is building a mechanical seven-segment display. Each of the segments are 3D printed in black PLA, and mounted to a piece of cardboard via a thin wire ‘axel’ going through the length of the segment. Where normal flip dots use an electromagnet to change each dot from one state to another, [sjm] mounted a very small vibrating pager motor to one end of the segment. When one half of a tact switch h-bridge is activated, the segment flips to the front. When the other half of the h-bridge is activated, the segment flips back.
Right now, this hardware is in the ‘extreme prototype’ stage, but results so far are encouraging. [sjm] has already designed a single-segment ‘module’. Plans for the electronics include optocouplers for two microcontroller pins for each segment and reed relays for each individual digit. For a four-digit display, these flip digits will only require 18 I/O pins.
You can check out [sjm4306]’s video for this project below. It’s a little bit long, but watch those things flip!














Hmmm… Forget the tiny “Micro Vibrator Motors”? (Ouch! $2.25 each from the ICStation link provided in the post.)
Instead use a “Lavet” type stepper?
Ref: https://en.wikipedia.org/wiki/Lavet_type_stepping_motor
So each segment would have a permanent magnet embedded with a bi-polar electromagnet behind them, or perhaps a uni-polar electromagnet with a return spiral spring in the segment mechanical part? The Lavet-Stepper approach lends itself to using cylindrical segments, black on one size, white on the other. I’m pretty sure the Lavet mechanical N-segment display technique has been done many times before. (sorry no references at my post time; do a search).
Price must’ve increased because they were 10 for around $3 last I checked.
$2.25 for 10Pcs.
At about 3 bucks for 10, I’m really excited to see where this goes! Would love a clock like this for my desk.
Tha Lavet stepper has a special field forming to ensure it only runs in one direction. You do not need this for the flip display. So what remains is a standard flip-dot drive:
A steel core with some remanence, a coil and a permanent magnet on the disc/segment. You also need one H-bridge like in the vibra-motor version, but just one pulse of several ms. The design is bistable due to megnetic remanence.
I do not see any advantage in the vibra motor.
For me it comes down to a combination of cost, ease of assembly and availability of parts. I’ve thought of going the route of discrete coil, metal armature and magnet but it still couldn’t come close to the less than $0.30 a segment using a prebuilt vibrating motor does with no extra assembly effort beyond gluing the flap on the end. Plus I got the motors for free so I really just needed to find something fun to do with them!
Why not use the same simple system used for steering the cheaper models of those tiny radio controlled cars? They have a small magnet between two coils. Changing the current direction through the coils snaps the steering left or right while a small bit of spring wire returns to center when steering power is off.
For a flip dot/segment display you’d want a mechanically bi-stable design so that power is only needed to flip.
Normally it’s just that: a permanent magnet and coil on a core. The latching is done magnetically as the steel core keeps it’s remanence.
Brian Benchoff,
You’re not kidding about the flip speed! Wow…
sjm4306,
Great project!!! That flip is like a magic trick! I like how you’re driving yours with opto isolators!
You might enjoy seeing my servo driven (instead of pager motors) seven-segment display.
I’m especially proud of the creative way I drove all those segments on mine with just a few transistors and no I/O expanders or motor drivers.
It took me much longer to design and print, but I agree with you totally on how awesome 3D printers are for making our own parts.
http://g33k.blogspot.com/2013/12/servo-driven-7-segment-display.html?q=display
Thanks man! Your servo drive seven segment clock looks awesome. Is there a video of it in operation, would love to see it in action.
Thanks. If you scroll down on that blog post, there are two videos and tons of build photos.
Alternative mechanics aside, what does the locked rotor current draw look like on a motor like this? How easy would it be to burn them out by applying a current when locked?
From the other side, how much could you reduce the operating voltage/current and still overcome stiction?
Continuous or momentary? Aren’t you just sending a pulse of a given polarity which you make as short as possible to flip the segment? Easy to test, just reduce the pulse until it fails then decide what your safety margin is and add that to get a pulse that should always be just enough.
You would do that with the conventional flip-dot drive: coil and magnet. The magnet core keeps it’s magnetization after the end of the pulse. This small DC motor sure has no remanence effect. So this is a much inferior solution to the existing.
In my testing friction is sufficient to hold the state of the relatively balanced flaps so long as the assembly is not shaken with quite a bit of force. Remember this is made to sit on a wall or desk so it shouldn’t be subjected to much movement anyway. Though I suppose a strong breeze at an opportune angle could also flip them.
He needs to think a bit more about the motor position, there are other options if you think in 3D. Put the motor at right angles, shaft pointing out of the clock face, and use a short screw section rotate the segment’s shaft. Or perhaps have the motor right behind the display and use two gears to interface to the segment shaft.
Then there is the “why use the motors at all?” question, but I guess it is a bit late for that…
However it does seem obvious that with a 3D print you can have a concealed coil inside the edge of the segment and the shaft metal on each end becomes an electrical contact. Then would be a similar coil in the part that holds the segment so that it’s polarity determines how the coils interact and control the direction of the segment face.
Thanks for the ideas. I’d done some experimentation and the motors have very low torque and are meant for high rpm so any type of mechanical linkage would be difficult and add complexity unless each one has some sort of gearbox to up the torque (which would result in slower switching which I would like to avoid). I really want this to just be a process of hit print and glue a few parts and be done with all mechanical assembly. Using prebuilt motors avoids having to buy or wind coils and mount magnets or the like (which combined would probably end up costing more than the pager motors).
I did think of maybe mounting the motors under the segments and using an armature like I’ve seen in commercial displays but when I mocked it up there just wasn’t enough torque in these tiny motors (perhaps a counter balance would help but KISS, Keep It Stupidly Simple). If I were to scale it up and get bigger motors this could work though.
For a first prototype this seemed the cheapest and most reliable method, but after I finish building this hopefully I can improve it for future versions.
You can just use a stationary coil and a moving magnet – and a magnetizable core – like anybody else does in flip-dots.
If the purpose of hacking were to do everything just like anybody else does then yes there would be no failure but there would also be no advancement or innovation. I’m just trying to use the cheap parts I have to do something I haven’t seen done before. I know it’s not the most direct or efficient method but it should be entertaining to see where this leads.
A coil has far less mass (and cost) and if the shaft end is the right shape it always seeks one of two positions when it rotates so a polarised pulse is all that is required. I guess it never occurred to you that people have good reasons for their specific suggestions?
If you are going to 3D print something anyway the complexity of the geometry only costs you at the conceptual stage and has negligible impact on the unit cost in production.
It’s a bit presumptions to make assumptions of what or what I haven’t considered. I did look into using a coil, magnet and metal armature a few years ago but I couldn’t find a cheap way of buying pre-made coils other than solenoids and I didn’t want to have to hand wind them myself since I wanted the option of scaling up the display in the future without much more investment or effort. Please dont get me wrong, I do appreciate the input and all of the wonderful suggestions I have received and will likely try them in a future iteration.
But for this prototype I wanted to try something different. These motors are ubiquitous and cheap in mass since just about every phone uses them and I happened to get a bunch for free (this was a huge motivator since I’m a starving college student lol). I really do know there is a good reason for conventional flip disc displays to use coil and magnet but I am trying to do this in an unconventional manner because it is more entertaining for me that way and this is hackaday, where not everything has to be perfect or efficient. Sometimes taking the long way round can be a good learning experience. I am using something for its unintended purpose to solve a problem that fits my needs and equipment (cost, availability of parts, tools, etc) that may or may not differ from your’s or another reader’s.
I hope I’m not just being defensive because I do enjoy conversing with others who have different perspectives, it’s just that this project isn’t some serious thing meant to go into production, I just want to have fun, build a one of a kind unique clock, and learn something while doing it.
Yeah you are being defensive because I was talking about the comments from “Martin” the prototroll, not you and I never suggested using magnets, as they are not necessary, but I needed to point this out due to Martin’s ignorant comments.
I’ve already acknowledged that you have committed to the motor path, and offered a few ideas for consideration, plus a few universal maxims that should be kept in mind. Even if your production run is only a set of less than 25 identical segments. Put the effort into the ideas and the 3D printer does all the detailed work for you.
And check out this guy’s youtube channel, fill your head with these videos before you go to bed and you never know what ideas you may wake up with. :-)
https://www.youtube.com/user/thang010146/videos
Oops sorry I misinterpreted your comment as referring to me. Anyway I do appreciate all the feedback I’ve received and even if I can’t or don’t get a chance to implement them in this prototype it is stimulating getting new ideas and ways that I didn’t think of.
Pager motor, what’s a pager!? :P
Have you ever played GTA 1?
The real displays use the bipolar magnet/coil arrangements. I have a couple flip segment displays and a couple flip dot displays and they both work the same way, and the beauty of how they work is they maintain the last “setting” darn near indefinitely with no power applied. And this is with a good amount of mechanical jostling, much more than they would ever be subjected to in real service. You only need power to flip them, and to light them at night. Both types of the displays that I have are black on one side and fluorescent yellow on the other and have a small inverter based fluorescent black light to illuminate them at night.
Back to Brian’s idea, it is clever, and if you don’t mind using power all the time and stalling the motors (I would run them on way less voltage than they are rated for as they are going to heat up and have no self cooling.. But it is a clever and inexpensive way to simulate the “real” thing. Plus they are gifting him the parts..
It doesn’t need to be permanently powered (and it’s only momentarily powered in the video) because there’s enough friction on the axle to hold the segment in position after it’s turned.
This is great news and has shifted my own attempt at a DIY flip dot another step forward. See the project log on HAD.io: https://hackaday.io/project/18541-dot-flippers/log/62647-progress-in-diy-flip-dots
I’d really appreciate some input in the comments section of the project log
Awesome project about this http://www.icstation.com/10pcs-4x8mm-micro-vibrator-motors-tiny-phone-vibrator-motors-5400rpm-60ma-with-wire-p-9966.html, hope more people will like your Post and like your project!!!^0^