
For this year’s office holiday party, [Gavan Fantom] wanted to do something really special. Coworkers were messing with LEDs to come up with displays and decorations, but they lack that old-school feel of mechanical displays. He wanted to create something that had retro look of moving elements, but didn’t want to just recreate the traditional flip mechanism we’ve all seen over and over.
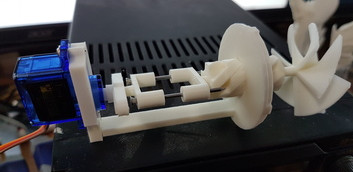
What [Gavan] came up with is breathtakingly impractical 8×8 display that sounds as cool as it looks. Each “pixel” in the display is a 3D printed screw mechanism rotated by a hobby servo. As the pixel is rotated in its case, it becomes progressively more visible to the observer. The opacity of the pixel can even be adjusted by varying the degree of rotation, allowing for rudimentary display of grayscale images.
Each element in the display is made up of seven 3D printed parts and two nails, which the mechanism slides on to move forward and backward. An 8×8 display needs 64 elements, which means the entire display needs 64 servos, 128 nails, and a whopping 448 3D-printed parts. Even with two printers attacking the production in parallel, the printing alone took over two weeks to complete.
The display is powered by a Raspberry Pi and three “Mini Maestro” controllers which can each handle 24 servos. [Gavan] found some sample code in Python to pass commands to the Maestro servo controllers, which he used as a template when writing his own software. The Python script opens image files, converts them to grayscale, and then maps the value of each pixel to rotation of the corresponding servo. He says the software is a little rough and that there’s still some calibration to be done, but we think the results are phenomenal so far.
Mechanical displays are a favorite of hackers, due in no small part to the awesome noises they make while in operation. While we’ve seen some very creative approaches to this type of display before, what [Gavan] has created here is certainly in a league of its own.













Marvelous execution on this one! I’ve wondered about building a flip dot display from scratch and think this is actually quite a bit easier but still hits the same benefits (high contrast, cool sound, no power draw except when changing pixels).
Group buy on injection molding these parts? :-P
Can these be injection molded with that twist/spiral?
It might be possible using whatever methods are used for computer fans and the like.
On a more practical perspective, of course, don’t miss https://hackaday.io/project/18541-dot-flippers
outstanding!
how about some gray scale, so those servos aren’t completely overkill
Hmmm, if you needed only binary, what is a more effective actuator in this case? I’ve used those 9g servos before. They’re inexpensive, but they’re also cheap. I find the plastic gears are easy to strip so I do wonder about the longevity of this design.
That’s part of the benefit of flip-dot, they use coils instead of motors so it is only the pivot point that wears and should last huge number of cycles.
rotary solenoids
Rotary solenoids. I’m not totally positive what’s inside of them but I have a dozen or so solenoids from industrial door latches that rotate 90 degrees with power and spring back without it.
We used rotary solenoids years ago on a couple of machines that needed to be deployed to locations that could not be counted on to have compressed air. The solenoids were used to replace the air cylinder of an product eject system. The basic mechanism was merely a mild helical ramp with ball bearings and a coil spring to return. The shaft rotated 90 degrees (left and right handed versions were available) and sucked into the coil housing about 1/16 of an inch (about 1.5 millimeters.) Made by Lucas, if memory serves.
They were very fast, even on 12 volts, and made quite the clacking noise. We could kick out individual product packages from a conveyor moving at 300 items per minute. Fast enough that we had to rectify the 12 volts and switch it because the 60 Hz AC waveform wasn’t timing accurate enough.
Just Googled ’em: “Ledex Rotary Solenoid”
Then it’s not bistable anymore. But probably you could also use ordinary DC motors. The friction keeps them in position. But you need an H-bridge for each motor to drive them back and forth. The servos include this already.
There are bistable solenoids, and if you really need to, you might just make them yourself. Just needs a coil winding rig.
I am totally up for receiving some greyscale 8×8 animated gifs and seeing how well they work, if anyone wants to post some. I’ll be happy to capture them on video.
If we were to make some, what FPS should we target?
Here’s something trivial : https://i.imgur.com/tSJfmhW.gif
That file seems corrupted.
I’d go for somewhere between 3-4 FPS. It can probably go faster, but that’s where it’s sitting at the moment.
Seems intermittant? You could try this link instead https://imgur.com/tSJfmhW … or I uploaded it again without transparency https://imgur.com/N57Xks4
Here’s a video of that gif, repeated a few times:
https://youtu.be/J_Xxf-CyufE
Great to watch in action.
Nice job, Gavan.
Nice job. Love it
I want a VT100 made from these!
;-)
I experimented with using the polarizing lenses from 3D cinema glasses. One fixed and another rotated.
A reasonable level of gray scale was achievable. Very quickly decided I didn’t have enough actuators in my junk pile. Floating them on water and using magnets gave interesting if unreliable results.
waiting for fullhd
Only one and a quarter millennia of 3D printing to go!
cool project! I would use only 3 motors and have it under-actuated (basically a robot moving to each pixel and rotating it separately) ofcourse it will take a minute or so for each frame to refresh, but that’s a nice feature in my opinion.
also – I wanted to print one for my students… source link on the website is broken.. pls fix.. I hope source includes the STL files.
what a nice project. Very interesting design, sure there is always room for improvement, but this design works and sounds great and depending on the image shown it could sound even better. These are just letters, if the pixels are fading in and out , very slowly, for instance to show a (low-res) expanding circle (as it would be like a stone dropped in a pond) the sound would be completely different.
This is a very nice display and perhaps even more interesting to watch then a conventional flip-dot display.
For all of you who were wanting greyscale animations, here’s a nice ripple effect that I think shows it off nicely.
https://youtu.be/ExFybO8zO8E