Blend the Japanese folding technique of Kirigami with an elastomer actuator, and what have you got? A locomoting snake robot that can huff around its own girth with no strings attached! That’s exactly what researchers at the Wyss Institute and Harvard School of Applied Sciences did to build their Kirigami Crawler.
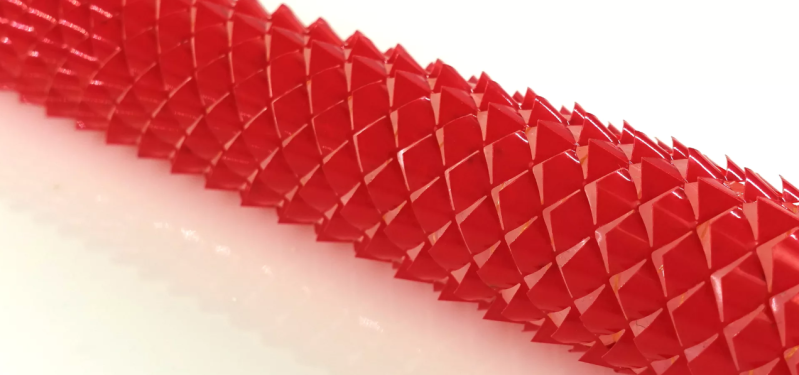
Expanding and contracting propel this crawler forward. As the actuator expands, the hatched pattern on the plastic skin flares out; and when it contracts, the skin retracts to a smoother form. The flared hatch pattern acts like a cluster of little hooks, snagging multiple contact points into the ground. When the skin retracts, these hooks fold back inside while giving the body a slight push forward in the process. It’s a clever tactic, and almost identical to the way real-world snakes propel themselves. In fact, after iterating on a few skin patterns, they found that a trapezoidal pattern, which most closely resembles that of snakeskin, can cover ground fastest.
We’re thrilled to see such authentic biomimicry come to us without any extreme tooling or special molds. Still not satisfied with your share of crawling robots for one day? Have a peek into the past, and indulge yourself with a sine-wave locomotion.
Thanks for the tip, [Olivia]!














Now they need to make it bidirectional.
Combine that cable Snake with the skin from this you have direction
How do snakes travel backwards?
Snakes lift portions of their bodies strategically, and usually have at least some portion of their traction oriented in three of more directions, which lets them synthesize the remaining vectors.
The three big snake locomotive techniques are rib-walking, undulation, and side-winding. It’s become commonplace to break rib-walking down into concertina locomotion and rectilinear crawling, since rib-walking isn’t really a good description of what’s going on. Sidewinding is least common and only energy efficient on very low friction surfaces, undulation is most common, the fastest snakes do a combination of undulation and rectilinear crawling.
I feel like this current style of “inflate and deflate” is not amenable to a traditional snake style of locomotion due to the lack of additional vectors necessary to facilitate said types of movement. Though perhaps something like that could be engineered? I also worry about the robustness of this current technique as well though.
They didn’t try horizontal slits. Horizontal slits would have provided the most suface area. Then again, I’m not working on that project. It may have somthing to do with the fragility of the plastic.
The Japanese have done some really great robotics work. Unfortunately a lot of that has been driven by the needs of the Fukushime plant clean up effort. This seems like a really nice motion process other than the obvious wear and tear on the surfaces (which the snakes solve by replacing their skin).
This solution is more elegant than the Japanese snake motion robots I have seen lately, I am just dubious of how useful this one would be given the wear surfaces. What does Harvard think the application for this might be?
if we only studied things with well defined applications we would still be living in the stone age. its just a prof of consent not a finished product its its application is to show the world “hey look this thing i made works”. just look at the laser, it took decades for someone to figure out something useful to do with it now they’re everywhere.