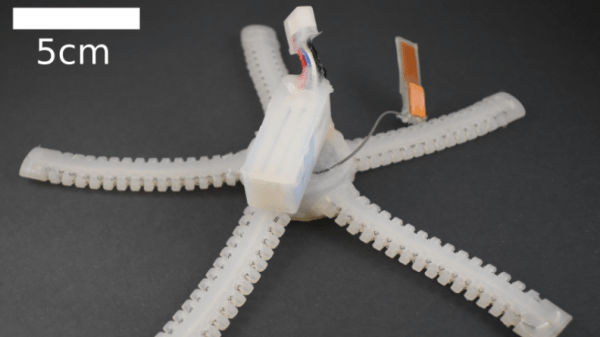
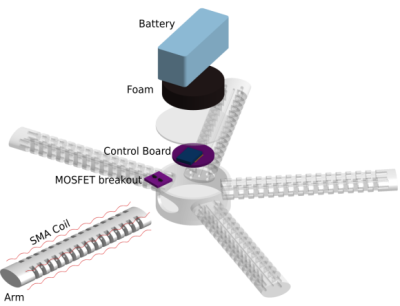
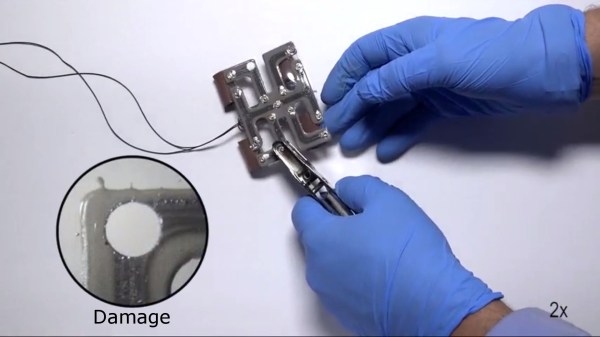
Over on their YouTube channel [Science Buddies] shows us how to embed LEDs in soft robots. Soft robots can be made entirely or partially from silicone. In the video you see an example of a claw-like gripper made entirely from silicone. You can also use silicone to make “skin”. The skin can stretch, and the degree of stretch can be measured by means of an embedded sensor made from stretchy conductive fabric.
As silicone is translucent if you embed LEDs within it when illuminated they will emit diffuse light. Stranded wire is best for flexibility and the video demonstrates how to loop the wires back and forth into a spring-like shape for expansion and contraction along the axis which will stretch. Or you can wire in the LEDs without bending the wires if you run them along an axis which won’t stretch.
The video shows how to make silicone skin by layering two-part mixture into a mold. A base layer of silicone is followed by a strip of conductive fabric and the LED with its wires. Then another layer of silicone is applied to completely cover and seal the fabric and LED in place. Tape is used to hold the fabric and LED in place while the final layer of silicone is applied.
When the LEDs are embedded in silicone there will be reduced airflow to facilitate cooling so be sure to use a large series resistor to limit the current through the LED as much as possible to prevent overheating. A 1K series resistor would be a good value to try first. If you need the LED to be brighter you will need to decrease the resistance, but make sure you’re not generating too much heat when you do so.
If you’re interested in stretchy circuits you might also like to read about flexible circuits built on polyimide film.
Continue reading “Embedded LEDs For Soft Robots Made From Silicone”