The average 3D printer is a highly useful tool, great for producing small plastic parts when given enough time. Most projects to build larger 3D printed objects use various techniques to split them into smaller parts which can fit inside the limited build volume of most Cartesian-based printers. However, there’s no reason a printer need sit inside a box, and no reason a printer can’t roam about, either. Hence, we get the RepRap HELIOS on wheels.
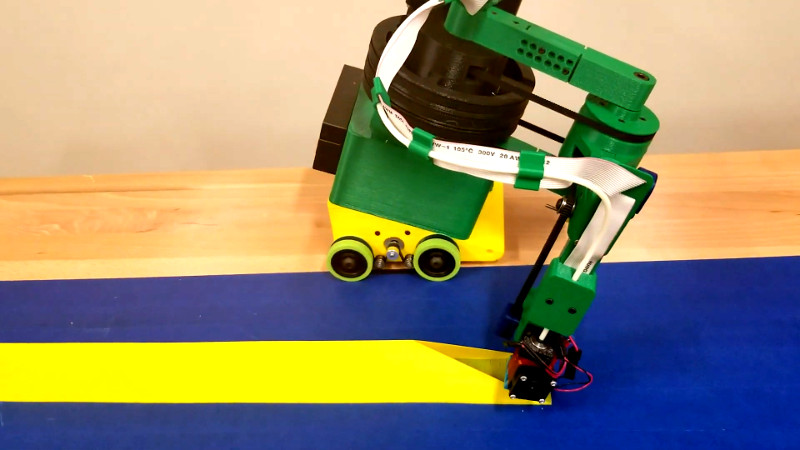
[Nicholas Seward] created the HELIOS and entered it into the Hackaday Prize in 2017, using a SCARA arm to build a printer with a large build volume and no moving steppers. One of [Nicholas]’s students then did a test, in which the HELIOS was mounted on an angled motorized cart, giving the printer potentially infinite build volume in one axis.
[Nicholas] expects the current basic setup to be capable of prints 200mm wide, 100mm high, and theoretically infinite length. There’s also potential to enable the device to create large curved parts by allowing the printer to steer itself with independently controlled motors.
There’s more work to be done, particularly to allow the printer to locate itself relative to its work space to avoid dimensional issues on large prints, but the preliminary results are highly impressive. We’ve seen other infinite volume printers, too – like this build using a conveyor belt design. Video after the break.
[Thanks to smerrett79 for the tip!]














Hmm, cool. Nicely written up, variations bound to continue, thanks for post :-)
this is the future; free roaming printer base with percise tracking and short, fast 3 axis drift compensation, imagine a drone fleet with attached extruder arms, working like collectively bees collecting material, charge, and instructions for their little part of the build.
Google “Grey Goo.” This is the first step in the end of the world.
Wasn’t there an episode of Red Dwarf where this happened, nanobots turned the ship into a planetoid!,
ok guys rule 1 of tech, don’t wipe out humanity FFS.
Interesting, but how is the drift (error accumulation) to be prevented on large prints?
With open loop control we are better than 1mm error over 1m. I think it can be quite a bit better than that but I don’t want to over promise. We did a test where we drove it back and forth 1m hundreds (or thousands) of times. At the end the printer was 1mm-ish from the starting position. That test indicates precision and not accuracy. However, a precise robot can be made accurate with calibration.
Interesting.
Are current filaments up to the task though? Delamination is a problem for some prints now. Will long layer times make that prohibitively worse? Also, beyond a few 10s of cms can prints handle the stress?
It depends. I don’t think you could print anything that could fit in the print volume. In my experience, delamination decreases with layer times (everything else held constant). I am anxious to test times with solid cross sections. However, a more immediate use case for us is to print a series of parts.
I think the next “killer app” ability of hobby robotics is extremely precise 3d positioning and sensing… essentially unlimited closed-loop motion control. This will change everything. A 3d printer on wheels could then essentially build a sky scraper.
There is a company near me that is trying to do just that. Ambots. They are also allowing multiple printers to collaborate so you aren’t bottle-necked by one nozzle.
Are the assembly resources for the Helios 0.2 available now? The hackaday.io is a little dead and the git repo hasn’t been updated in a while.
We made a version after the one that is on the GitHub. It fixed some issues but created a few new ones so I never got around to releasing it. I wish I could give you a prediction for when we will release.
This is probably a very dumb question from a newb, but why is the printer put on an angle? Why not print the layers “as usual” (with the z-axis vertical) using the wheels to drive the cart back and forth on the Y (?) axis? is it an accuracy issue?