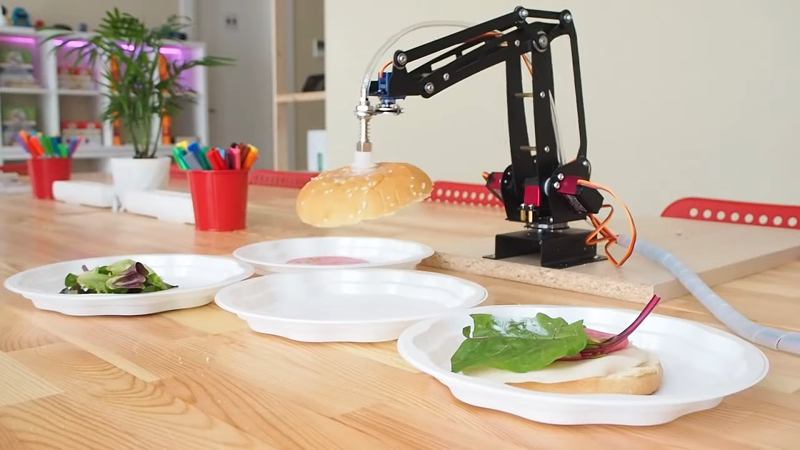
Building a robot arm is fun, but no longer the challenge it once was. You can find lots of plans and kits, and driving the motors is a solved problem. However, there is always one decision you have to make that can be a challenge: what effector to put on the end of it. If you are [MertArduino] the answer is to put suction at the end. If you need to grab the right things, this could be just the ticket for reliably lifting and letting go. You can see a video of the arm in action, below.
The arm itself is steel with four servo motors and comes in a kit. The video shows the arm making a sandwich under manual control. We suspect he might have put it under Arduino control but there’s no sudo for making sandwiches.
An air pump and a solenoid valve round out the arm. An Arduino reads some pots to control the servo motors on the arm. However, the air pickup is manually controlled. It wouldn’t be very hard to use a FET or a transistor to put that under Arduino control, as well.
This made us think of air tweezer designs we’ve seen in the past. We also wondered if the arm was robust enough for a pick and place setup.














https://xkcd.com/149/
“What is my purpose?”
“You make the sandwich”
“Oh. My. God.”
My first youtube video! With a Picaxe because Arduinos either weren’t a thing yet or were only starting.
https://www.youtube.com/watch?v=tsQKTUYtZvo
Cool, thanks for posting
That is *begging* for a balloon full of coffee grounds!