
It sometimes seems hard to believe that we humans have managed to explore so little of what we have so much of: the seas. Oceans cover something like 70 percent of the world’s surface, but we’ve only mapped 20 percent of the ocean floor. The 228,000 ocean-dwelling species that we know about represents about ten percent of the estimated total aquatic species. And almost all the life we know about, and the area that we’ve explored thoroughly, is limited to the first few hundred meters from the surface.
The paucity of our deep-water investigatory efforts has a lot to do with the hostility of the sea to those who haven’t evolved to survive in it. It takes extreme engineering and fantastically expensive machines to live and work even a few meters down, and even then submariners quickly become completely isolated from the rest of the world once they’re down there. Underwater communication is particularly challenging, since the properties of seawater confound efforts to use it as a communications medium.
Challenging though it may be, underwater communication is possible, and in this article we’ll take a look at a few modalities that have made operating under the sea possible, and a new technology that might just extend the Internet below the waves.
Hello, Gertrude?
For most of the early years of the Silent Service, once a submarine was submerged, it was on its own. For the submarines and U-boats of World War I, this fact was of little practical consequence since these boats operated mainly as surface vessels, submerging only to attack or to evade pursuit. There was little need for command authorities to contact them during the small fraction of time they were submerged, and as they mostly operated alone and attacked on the captain’s initiative.
Later in the century, as submarine tactics morphed into “Wolf Pack” attacks, the need for underwater communications between boats to coordinate attacks became clear. U-boat and submarine captains depended on their high frequency (HF) radios to communicate between boats in the pack and coordinate their attacks on convoys, but this could expose them to detection by opposing forces using radio direction-finding gear, and since they needed to be surfaced to use their radios, they were easy pickings for surface vessels and aircraft.

One of the earliest modes of underwater communication that the US Navy fielded was the AN/BQC-1 Underwater Telephone. This was a battery-powered and completely portable device that was used by surface vessels to communicate with submerged submarines, and for subs to communicate with each other. Commonly referred to as the “Gertrude”, the device was self-contained except for the hull-mounted transducer. The base unit had a telephone handset for voice communications between units; in addition, the Gertrude could be made to emit a 24.26 kHz audio tone to call to other vessels operating sonar sets using that frequency.
To transmit voice, the Gertrude used a modulation method that’s familiar to amateur radio operators: single-sideband. Just like radio waves, an acoustic carrier wave can be amplitude modulated. In the case of the Gertrude, the carrier wave was anywhere from 8.3375 kHz to 11.0875 kHz, and just like in radio, the receiver and transmitter had to be tuned to the same carrier frequency. On the transmitter side, the AM signal was filtered to remove the carrier wave and one of the sidebands, leaving a single-sideband signal that was applied to the transducer. The receiver demodulated the SSB signal with the standard product detector and beat-frequency oscillator arrangement, very similar to that used in SSB radio signals but at different frequencies.
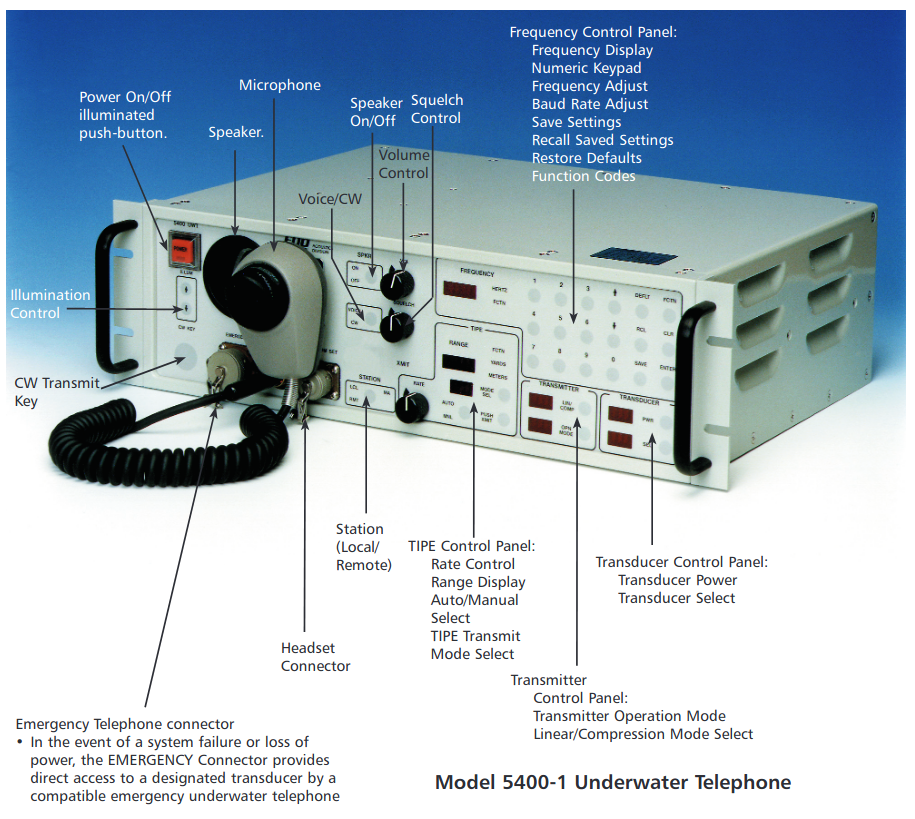
The AN/BQC-1 Gertrude remained in service through the end of World War II and into the Cold War era. A more powerful unit, the AN/WQC-2, was put into service in 1945 and some version of the technology remains in almost every US Navy vessel to this day. Modern underwater telephones still use the SSB modulation scheme and still support the frequencies that were established by the Navy for the original Gertrude, even if the electronics behind it all has changed vastly over the intervening decades.
Low and Long
As useful as they are, acoustic underwater telephones have limited capabilities. The range on acoustic telephones is limited; the AN/BQC-1 was best used for voice comms at less than 500 yards (365 m), although its 24.26 kHz ping could reach out to ten times that distance. Acoustic waves are subject to all the same vagaries of propagation as radio waves are, with reflections off solid surfaces and diffraction by layers of differing water temperature or salinity resulting in multipath interference or even total loss of signal.
Submarines were also moving to a vastly different role in the Cold War years, as nuclear-powered boats came to the scene. Capable of months at sea, these boats became the perfect platforms for ballistic missiles, which would need to be in contact with command authorities to a degree that the skippers of WWII subs would never have thought possible. But radio waves generally don’t penetrate seawater, raising the problem of a sub having to periodically surface to check for new orders and losing its one tactical advantage: stealth.
To keep the subs safely below the surface, naval commands began exploring the very lowest end of the radio spectrum. While the high frequency (HF: 3 MHz to 30 MHz) and low frequency (LF: 30 kHz to 300 kHz) bands are perfectly capable of reaching across the globe thanks to ionospheric refraction, the high conductivity of seawater rapidly attenuates signals in these bands.
Dialing down the spectrum a bit, the very low frequency (VLF: 3 kHz to 30 kHz) band starts to exhibit decent penetration of seawater, down to a depth of perhaps 20 meters. This is not deep enough to ensure the stealth of most submarines, which need to unfurl a long antenna wire to trail behind them as they cruise along far too close to the surface for comfort. VLF communications also suffer from bandwidth limitations, making voice communications impractical. VLF comms are therefore limited to a bit rate of 300 bps or so. Another disadvantage is that the huge antenna arrays and high power transmitters needed for VLF make two-way communications impossible.
Going even further down the spectrum, signals in the extremely low frequency (ELF: 3 Hz to 30 Hz) band are capable of penetrating 120 meters of seawater, which is deep enough for any submarine to maintain its stealth. The US Navy began investigating the ELF band in 1968 with Project Sanguine. With wavelengths from 10,000 to 100,000 kilometers, an ELF transmitter requires enormous antennas; indeed, the original proposal for an ELF station in Wisconsin would have buried antenna cables under 40% of the land area of the state. These cables would have coursed with 800 megawatts of power while transmitting.
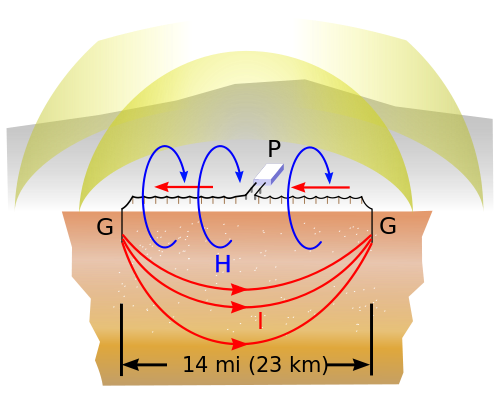
Project Sanguine was never built, defeated by antiwar activists and budget hawks alike. Nor were the series of scaled-down ELF projects the Navy proposed built, until finally in 1989 Project ELF came online. There were two transmitters, one in Wisconsin and one in the Upper Peninsula of Michigan. The antenna feedlines are 14 to 28 miles (22 to 44 km) long, strung on wooden poles like utility lines and connected to enormous ground rods driven deep into the bedrock. When energized, current flowed between the ground rods and through the granite bedrock, creating a massive magnetic field that generated the ELF waves. It was basically a giant loop antenna made of rock.
The completed system was capable of sending a coded message on 76 MHz to a sub submerged 400 feet (122 m) off the coast of Florida. Unfortunately, the bandwidth of the signal was so low that it took 15 minutes to send a single three-character code group. Project ELF could only ever serve as a “bell-ringer” signal, to notify a sub to surface and use other means to receive a full message. The system was shut down in 2004 once VLF technology had advanced far enough that subs could use it without fear of detection.
WiFi Under the Waves
Limited bandwidth undersea comms certainly have their place, but being able to securely communicate underwater at high bit rates could be possible if new research pays off. In a recent paper, Basem Shihada et al from the King Abdullah University of Science and Technology have demonstrated a system they call “Aqua-Fi” that extends the Internet to the underwater realm. Using mainly off-the-shelf components, including a Raspberry Pi 3b, they were able to build an IEEE 802.11-compliant wireless network with a range of up to 20 meters. Both LEDs and lasers were used for emitters, with the lasers providing greater range but at the cost of directionality. In tests using waterproofed smartphones and blue and green lasers, they were able to achieve 2.11-Mbps and conduct Skype calls through the Aqua-Fi link.
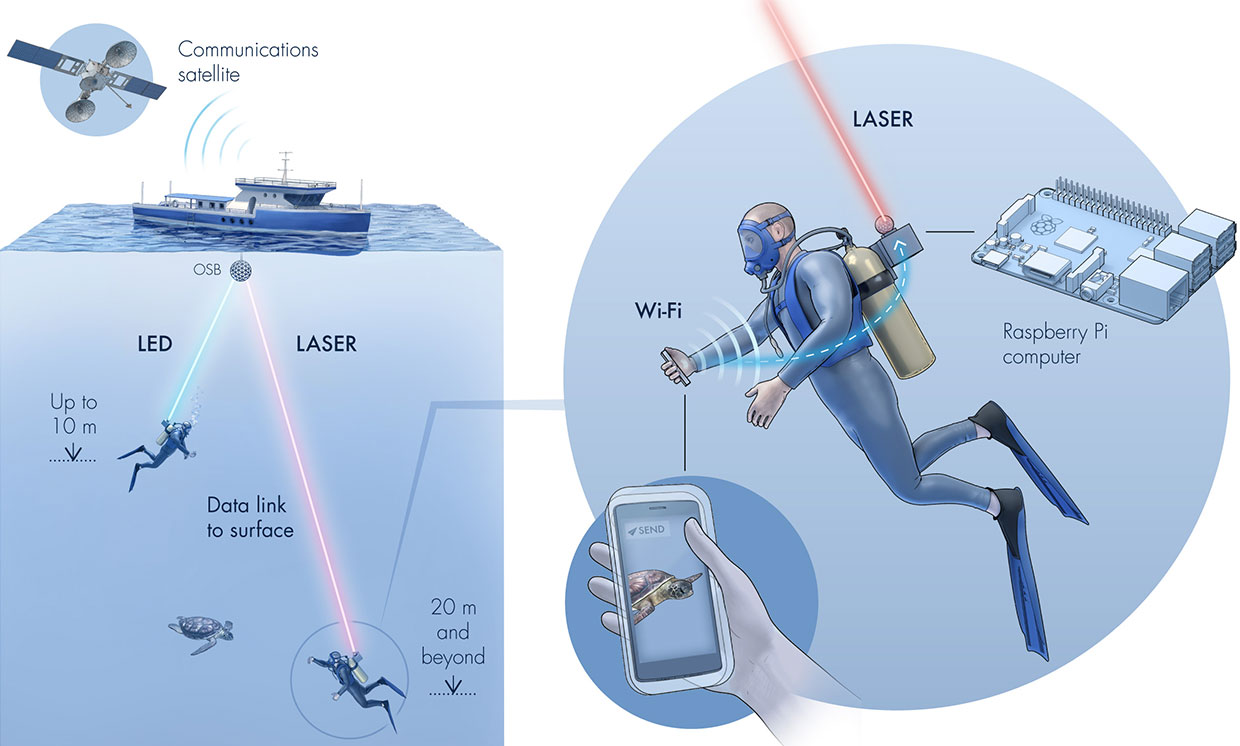
It’s not likely that Aqua-Fi has much future as a network for submarines, but undersea warfare is far from the only activity such a system could support. Undersea research could benefit from making the Internet available below the surface; one could imagine a solar-powered buoy with a satellite link above the surface and a string of Aqua-Fi access points trailing into the deep below. Divers, remotely operated vehicles, or autonomous drones could take advantage of a full-time connection to the Internet, leading to advances in marine biology, geology, conservation, or even just recreation like sport diving. We can get down with that!














> ELF
> 76 MHz
Pick one.
It’s 76 Hz according to http://www.fas.org/nuke/guide/usa/c3i/fs_clam_lake_elf2003.pdf
76 Hz, not 76 MHz.
Typo?
“In the case of the Gertrude, the carrier wave was anywhere from 8.3375 kHz to 11.0875 kHz, and just like in radio, the receiver and transmitter had to be tuned to the same carrier frequency.”
Later in the article you wrote:
“Dialing down the spectrum a bit, the very low frequency (VLF: 3 kHz to 30 kHz) band starts to exhibit decent penetration of seawater, down to a depth of perhaps 20 meters. This is not deep enough to ensure the stealth of most submarines, which need to unfurl a long antenna wire to trail behind them as they cruise along far too close to the surface for comfort. VLF communications also suffer from bandwidth limitations, making voice communications impractical. VLF comms are therefore limited to a bit rate of 300 bps or so. Another disadvantage is that the huge antenna arrays and high power transmitters needed for VLF make two-way communications impossible.”
Not understanding how voice comms in 8-11 KHz spectrum is possible, as a practical matter.
8.3375 kHz to 11.0875 kHz is the Acoustic frequency for Gertrude, not radio waves. The later part of the article is specifically about radio.
It’s acoustic waves, not electromagnetic ones.
“the high conductivity of seawater rapidLY attenuates signals in these bands.”
Thanks.
In 1968 when in the U.S. Coast Guard inroute in the Gulf of Mexico, as a Morse radioman, I copied a message of 5 letter coded groups such as … UFBOM BCNUT RPMNW … It was about 80 groups long and then repeated several times and sent very slow in Morse terms unlike HF high speed code. This was around 500 mHZ and very strong. I figured it was a harmonic of a much lower frequency. An ELF transmission to our ‘Boomers’ oridinting possible from a transmission site in the upper peninsula of Michigan or therebouts?
Upon arrival in Charleston SC, the Comms officer and I took a copy of it over the the Naval sub base operations office there.
We were told to forget about it and to destroy the copy of the message and logging of it. And, not to speak of it to anyone.
2 + 2 = ELF.
At least your post wasn’t full of mistakes I would find impossible for an educated radio-operator to make thus making me not believe anything you say….
and yet here you are speaking of it …
https://www.youtube.com/watch?v=csYtAzDBk00
WOW… that’s pretty cool
Optical links underwater? Maybe in the Caribbean. Sometimes. Go find any commercial diver and ask them how often they can actually see what they’re working on, even in their own hands.
“Undersea research could benefit from making the Internet available below the surface; one could imagine a solar-powered buoy with a satellite link above the surface and a string of Aqua-Fi access points trailing into the deep below.”
A buoy with an optical fiber cable direct to whatever needs the link is the dependable solution to this.
Optical fiber is interestingly also one of the few options for a travelling torpedo to communicate with the “host submarine”.
Agreed – though tethers are limiting in their own ways so very low frequency audio or radio waves will have their uses.. I can’t see light working well though – clear water attenuates and scatters most wavelengths of light badly and lasers will need alignment which is going to be seriously challenging if you can’t know the exact/relative positions of each end without the communicator working.. Then add in all the suspended stuff in the water I doubt you’d get 5M of decent signal in many places…
scattering is not that bad, it basically reduces directivity, like a lower gain antenna. Sometimes that is even good, as you do not need to aim your antenna/lens so precisely. You do not need to see a picture, but intensity variations. A TV remote also works, if you point it to the opposite wall.
Acoustic deepwater comms is kind of challenging – there are depth-dependent effects, and water is a moving medium – you get medium Doppler, too. Coherence bandwidths are low, and losses high. Times when the communication channel stays stable is limited, too.
A really interesting field!
I really liked [Michel Barbeau]’s presentation on mobile acoustic underwater communications. This might be a bit more promising than a laser underwater (although the laser idea is nice – we’d just need a laser that hits a low-absorption wavelength, not aware of one, though).
https://www.youtube.com/watch?v=2XtIBJtDEQg
Challenging but do-able! I work in design of underwater communications, and acoustic, RF and optical communications have all been used routinely for a long time (years to decades for each type), in defence and commercial applications. Each has their strengths and weaknesses (power consumption, alignment, probability of intercept, environmental impact, environmental susceptibility (e.g. turbidity for optical, sound velocity profile and raybending for acoustics), cost, ability to network etc etc.
And a modern SSB diver comms unit doesn’t look like that, it ‘looks’ like an SDR :-)
Actually this looks like what’s used on AUVs for deep water communication… Like the ones made by Sercel ( https://www.sercel.com/products/Pages/mats3g.aspx )
Using lasers underwater for communication,
I wonder how the sharks will react?
B^)
This is the WSB 750 tower in Atlanta, GA. According to someone who used to do site maintenance, there supposedly is, or was, some ELF/VLF equipment co-located here. Although some searching never turned up anything to corroborate this, I do remember there being “Dept Of The Navy — Secure Facility” signage on one of the doors, and it was a section of the site this person never had access to. It might have been for research, or it may have been an active communications system. Or it may never have been anything at all.
https://goo.gl/maps/uLa6QChWV4Q3RtVs6
See TACAMO page 10 http://collinsradio.org/Signal/newsletters/Issue%2072%204th%20Quarter%20of%2013%20Post%20Rockwell%20(PDF).pdf
http://collinsradio.org/Signal/newsletters/Issue%2072%204th%20Quarter%20of%2013%20Post%20Rockwell%20(PDF).pdf
500 yards = 457.2 meters
Sharks with frickin’ laser beams?
Kudos to Joe Kim!
A yellow submarine phone reminiscent of the novelty phones of the 1980s!
This skips over several of the systems I was involved in developing/researching, including SSIXS, OTCIXS, and an experimental aircraft-based blue-green laser system that nearly crashed the helicopter a colleague was in (it blew a flight-critical circuit breaker).
Aha, since most of these methods seem to be rather short range, I have come up with a simple solution to leverage one underutilised feature of submarines that has been regarded as a folly in the design for decades… just yell out of the screen door.
At Battlemesh in Portugal in 2016, there was one presentation about underwater communications:
https://battlemesh.org/BattleMeshV9/Agenda?action=AttachFile&do=get&target=Underwater_electromagnetic_communications_INESC_TEC_battlemeshv9.pdf
I guess they were downconverting a 2.4GHz wifi transmitter to 700Mhz.
Optical transmission is only practical in good visibility. Its not reliable in real world with weather conditions. Fish and other marine life can mess you right up. In practice Optical Aquatic communications work less well the more you need them.
Thank you, Dan Maloney, for the lovely article.
About the underwater communication networks, you can see the European project Sunrise http://fp7-sunrise.eu/
In the past, we also worked a lot on LiFi experimenting 10 Mbps up to 10 m in dirty water.
Cossu, G., Sturniolo, A., Messa, A., Grechi, S., Costa, D., Bartolini, A., … & Ciaramella, E. (2018). Sea-trial of optical ethernet modems for underwater wireless communications. Journal of Lightwave Technology, 36(23), 5371-5380.
Cossu, G., Sturniolo, A., Messa, A., Grechi, S., Scaradozzi, D., Caiti, A., & Ciaramella, E. (2018, March). Sea-trial of an ethernet-based underwater VLC communication system. In Optical Fiber Communication Conference (pp. Tu2I-2). Optical Society of America.
Cossu, G., Sturniolo, A., Messa, A., Scaradozzi, D., & Ciaramella, E. (2017). Full-fledged 10Base-T Ethernet underwater optical wireless communication system. IEEE Journal on Selected Areas in Communications, 36(1), 194-202.
Caiti, A., Ciaramella, E., Conte, G., Cossu, G., Costa, D., Grechi, S., … & Sturniolo, A. (2016, August). OptoCOMM: introducing a new optical underwater wireless communication modem. In 2016 IEEE Third Underwater Communications and Networking Conference (UComms) (pp. 1-5). IEEE.
I do not think AN/BQC-1 actually made it into World War 2, as “in service”. There may have been prototypes in trials by 1945, but not production units under the contracts. I think there were some of the earlier sets that could accept audio inputs (like a microphone) for emergency use.
I was a crew member on USS DOLPHIN. Back in the 90’s we tested 4 underwater phones for over 8 hours ( so boring) US, French, English, and I do not remember the 4th. I even got to say a few words, which by the way, were scripted like a movie script.
All phones worked well.
At Tinker AFB in Oklahoma City the US Navy maintains a feet of E-6B aircraft flying 24/7. These are part of TACMO (see Wikipedia). Based in nearly the center of continental US, they fly a large loop north and south from the gulf to the Canadian border for 10 to 12 hours a day. At least one plane is always in the air. On the top of the fuselage is a large dome holding a satellite antenna. A long wire ELF antenna is trailed out the back of the plane to send short coded messages to submarines on patrol.
In essence, the plane serves as a repeater that’s relatively immune from the sabotage land-based ELF antenna systems are susceptible to.
Why not fire some modulated neutrino beam? Neutrinos are great at water penetration. Everybody loves neutrinos!