Quadcopters have incredible flying abilities, but if one loses just a single motor, it drops like a rock. Researchers from the University of Zurich’s Robotics and Perception Group have proven that this does not need to be the case by keeping a quadcopter flying with only three motors.
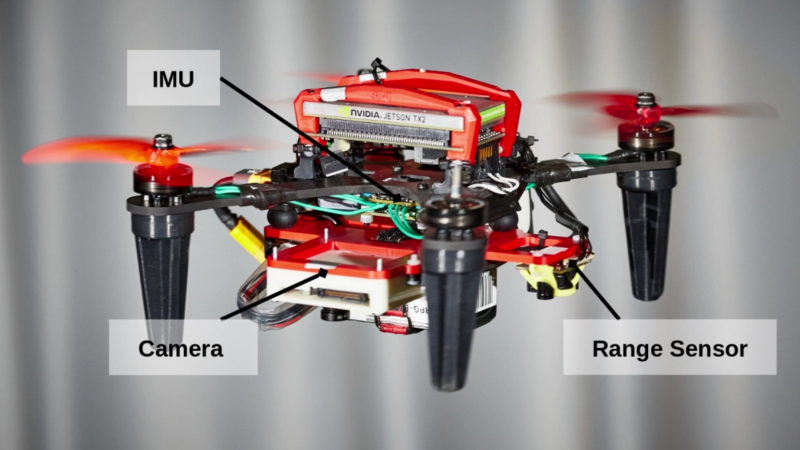
A quadcopter usually has enough thrust to stay aloft with only three motors, but it will spin uncontrollably in the yaw axis. It is impossible to stop a quadcopter from spinning, so the focus for researchers was on keeping the drone controllable while it’s spinning. To achieve this, accurate position and motion estimation is required, so they attached a pair of cameras to the bottom of the craft for visual-inertial odometry (VIO). One is a normal optical camera, while the other is an event camera, which has pixels that can independently respond to changes in light as they occur. This means that it has better low light performance and does not suffer from motion blur.
The feeds from the cameras are analyzed in real-time by an onboard Nvidia Jetson TX2 for state estimation, which is then used with an optical range sensor and onboard IMU to maintain controlled flight, as demonstrated in the video after the break. The research paper is free to read, and all the code is available on GitHub.
New developments in drone control schemes are always fascinating, like this hexacopter with an innovative motor layout to achieve six degrees of freedom, or a conventional helicopter with a virtual swash plate.
Thanks for the tip [Qes]!














I would think that cameras would not be needed, even cheap 12$ drones offer a mode that enables yaw to not be the direction control, the gyro keeps orientation while spinning. Line of sight control lets you use the control stick to move the drone away, push stick away regardless yaw direction. Add gps and you might get return to home. Recovery with motor or esc fail would be welcomed in inav or ardupilot (with out redundancy)
This just begs the question: why would an university group expend so much effort to remedy a problem that does not exist? In the video the quadrotor crashes with standard camera in too dim a lighting. Isn’t this a sign that it can’t handle itself after one motor fails?
I’d bet this is funded by a large company for commercial drone use. If a large lifting quad (aka amazon drone) loses a prop over a congested area, falling could cause injury, death, and lawsuits. assuming this was on a delivery drone, a 1 in a million flight failure from bumping an object, sabotage, or mechanical failure would mean multiple daily crashes for a company like amazon. If the drone can limp home, not only do you prevent the liability, but you also can recover the drone and repair it.
More than that, the FAA needs to be convinced that the drones are safe before they can fly over populated areas.
Gyroscopes build up error, and they have a maximum angular rate they can resolve.
For something like this, they need to be particularly precise, much more than is possible with a cheap gyro, I’d assume.
> It is impossible to stop a quadcopter from spinning
No, it’s just more difficult. You have to fly with two rotors and use the third remaining one to push and pull to keep it level.
Dude no.
The quadrotors propellers are spining in opposite directions in such a way that rotors diagonally across from each other are spining in the same direction. In that way, if you were to provide the main thrust for levitation with the two propellers diagonally across from each other, the drone would start spinning untill the drag of the rotating drone body levels out with the drag of the two spinning blades. If you were to use the two propellers next to each other, then it is true that the drone would not yaw arround like a frisbee; rather it would flip and tumble and would not be airborn for long, as both of those propellers are located on the same side of the center of gravity and would provide a massive torque in either the pitch or roll direction.
I believe they are implying a yaw. Two motors are spinning clockwise, one is spinning counter-clockwise, one is dead. The copter will spin clockwise.
Indeed you could fly with 2 motors like a chinook style (alas without the tilting servos). And the third only push/pull (but this does however imply you need to reverse a motor and those small drone motors controller circuits don’t always support that, you need full h-bridge on each motor instead of single mosfet that does pwm for speed). So yes I can get why they start spinning. But indeed a little more electronics ‘extra tilt servos’ or ‘reversible motor’ would indeed make it possible to keep flying without going into a crazy spin.
The pitch on the props is fixed. Spinning the motor opposite to its normal direction means anti-lift forces. The Chinook has opposite pitched rotors – one clockwise, one counterclockwise. If one goes to variable pitch propellers then the next step is to use just one and have a tail rotor and reinvent the helicopter.
That’s something along the line I was thinking, but it does mean you need to have enough power in two motors and what charge remains in the battery to be able to lift the whole assembly with just two motors and two props. Probably not a problem for a little toy quadcopter, but when it comes to the larger machines that carry expensive equipment you’d be riding closer to the limits, and realistically those are the ones that care the most about not falling from the sky.
I would add vertical flat surfaces to slow down the rotation when rotor fails, but it will be more ffected by winds. Maybe collapsible flat panels would help. Fold them out only when rotor fails.
Impressive demo! The damaged quadrotor sounds like a tornado of angry bees once it starts spinning :)
Now heading down the rabbit-hole of event cameras, thanks Hackaday!
Have fun :) Event cameras would actually make for an interesting HaD article. I work at a company developing them, feel free to ask questions.
If only there was a way to have more than 4 motors so the loss of one motor isn’t such a difficult problem to solve….Oh wait…
you’d have the same exact problem…for an even number of motors you could theoretically cut the opposing motor, provided you still have enough thrust to stay airborne. Odd number of rotors will need to allow spinning.