Quadcopters have incredible flying abilities, but if one loses just a single motor, it drops like a rock. Researchers from the University of Zurich’s Robotics and Perception Group have proven that this does not need to be the case by keeping a quadcopter flying with only three motors.
A quadcopter usually has enough thrust to stay aloft with only three motors, but it will spin uncontrollably in the yaw axis. It is impossible to stop a quadcopter from spinning, so the focus for researchers was on keeping the drone controllable while it’s spinning. To achieve this, accurate position and motion estimation is required, so they attached a pair of cameras to the bottom of the craft for visual-inertial odometry (VIO). One is a normal optical camera, while the other is an event camera, which has pixels that can independently respond to changes in light as they occur. This means that it has better low light performance and does not suffer from motion blur.
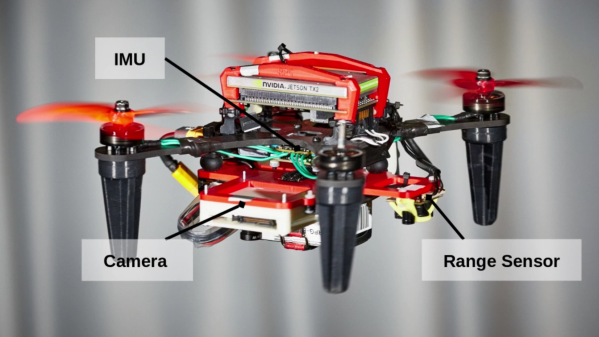
The feeds from the cameras are analyzed in real-time by an onboard Nvidia Jetson TX2 for state estimation, which is then used with an optical range sensor and onboard IMU to maintain controlled flight, as demonstrated in the video after the break. The research paper is free to read, and all the code is available on GitHub.
New developments in drone control schemes are always fascinating, like this hexacopter with an innovative motor layout to achieve six degrees of freedom, or a conventional helicopter with a virtual swash plate.
Continue reading “Controlling A Quadcopter With One Dead Motor”










