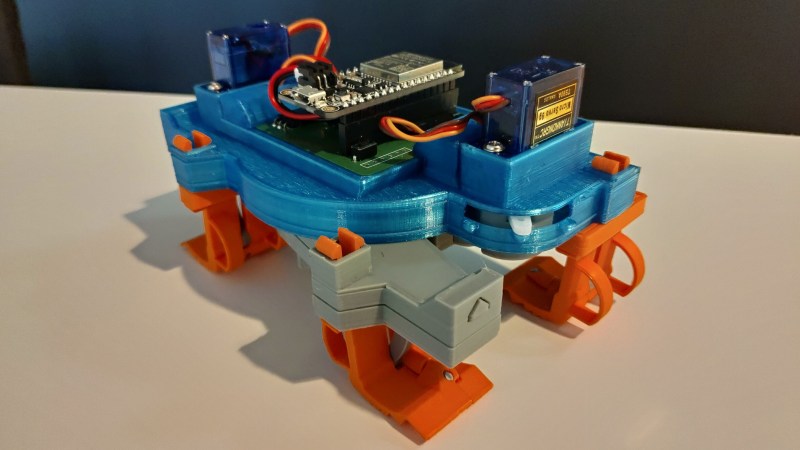
The ability to quickly create complex parts with 3D printers has created a platform to show off mechanical design skills. This is true in the case of [Dejan Ristic]’s capable little Tardygrade walking robot, which uses only two servos and a bunch of clever 3D printed parts.
The robot’s chassis is split into two subassemblies, each with a pair of feet on diagonal corners. As one pair of feet lifts the robot, the other section of the robot can rotate before coming back down, allowing the robot to turn. One servo handles the actuation of the feet, while the other rotates the body as required. An ESP32 based controller creates a web server user interface, and power comes from a lipo cell.
The interesting part of this robot is in how [Dejan] designed it for printing and assembly. All the parts can print without support, and in the correct orientation to optimize strength. There are only six screws in the assembly holding the servo and servo horns, while everything else uses snap fits or short pieces of filament. Take a look at the videos after the break to gain some appreciation of the design effort and attention to detail that went into this robot. Even the contact surfaces of the feet were carefully designed for optimum walking over flat surfaces and small obstacles.
This reminds us of [gzumwalt]’s little 3D printed creations, like the fridge crawler and mechanical edge-avoiding robot.














When is someone going to build a real Marvelous Toy? https://www.youtube.com/watch?v=XLYefZkOMB0
This is from Wikipedia “The name Tardigradum means “slow walker” and was given by Lazzaro Spallanzani in 1777.”
I do agree with you in regards to proofreading.
Haha, sorry for the disappointment. I named the project Tardygrade since I thought the robot superficially resembles that animal. Also it’s kindof slow and has a similar waddling gait.
If you’re jonesing for the real deal I can recommend the excellent YouTube channel “Journey to the Microcosmos”.
Oops, sorry! Double post.
I honestly never knew that tardigrades were considered hip. I guess we run in different circles. But let’s not feud about it. What is this? Twitter?
Haha, sorry for the disappointment. I named the project Tardygrade since I thought the robot superficially resembles that animal. Also it’s kindof slow and has a similar waddling gait.
If you’re looking for the real deal I can recommend the excellent YouTube channel “Journey to the Microcosmos”.
I like the name, I think it suits. Thank you for sharing this project, it’s an interesting execution, and good documentation. Also, I appreciate that you’re open sourcing it and (potentially) selling kits, I think that’s a great model. Sorry for the weirdly negative comments.
I loved the bot, but the name gives editors fits.
I changed two instances of “tardygrade” to “tardigrade” before heading over to IO and noting that you spelled it that way on purpose. :)
I is an prooofreader ;)
Proofreadimg is hard.
Enouf with inYourEndoh
Based on the criticism of typos and editing, I suspect you do not know that a majority of scientific publications have typos in them. In other words, often several professional scientists, writers and editors will not notice them until the manuscript is in press. To criticize someone for typos/grammatical mistakes is laughable and intellectually lazy (especially when their comments contain them). It is one thing to not like a project, it is another thing to be critical of someone’s unintentional mistake.