There are a variety of possible motor configurations to choose from when building a fixed-wing VTOL drone, but few take the twin-motor tilt-rotor approach used by the V-22 Osprey. However, it remains a popular DIY drone for fans of the military aircraft, like [Tom Stanton]. He recently built his 5th tilt-rotor VTOL and gave an excellent look at the development process. Video after the break.
The key components of any small-scale tilt-rotor are the tilt mechanism and the flight controller. [Tom]’s tilt mechanism uses a high-speed, high-torque servo that rotates the motor mount via 3D printed gear mechanism. This means the servo doesn’t need to bear the full load of the motor, and the gearing can be optimized for torque and speed. [Tom] also used the tilting motors for yaw and roll control during forward flight, which allows him to eliminate all the other conventional control surfaces except for the elevator.
The flight controller consists of a Teensy and gyro/accelerometer module, and runs dRehmFlight flight stabilization firmware. dRehmflight was specifically created to be easily adapted to a wide variety of experimental aircraft configurations, and it allowed [Tom] to get airborne on the first attempt.
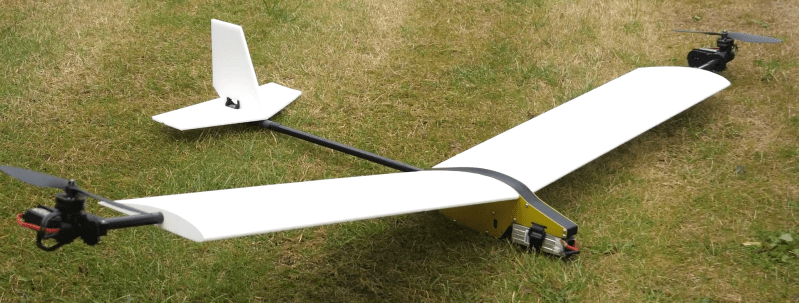
Carbon fiber tubes are used for the wing spars and tail boom, and are bolted to a fuselage made from 3D printed brackets and 1 mm fiberglass-reinforced plastic sheet. [Tom] picked a NACA 4412 airfoil wing for its linear coefficient of lift over a wide angle-of-attack range, allowing a smooth transition between hover and forward flight. The wing was 3D printed with lightweight foaming PLA (LW-PLA), which required some careful design for a quality print. The foaming of LW-PLA means it will always ooze if it stops extruding, so [Tom] designed the wing surface and internal ribs to be extruded in one continuous line using the slicer’s “vase mode”. There were some issues with the matt black wings starting to warp in the sun, which was solved by re-printing the wings in white.
The aircraft performs well in both flight modes, but had some trouble slowing down when transitioning back to hover. It’s a major improvement over the previous version, which lacked yaw control in a hover, and was a bit unstable in forward flight.














The v22 is the closest we have to a transformer.
Was a bit surprised the wings were 3d printed – would have expected more ‘traditional’ model plane wings would be a lot lighter, and just as robust.
The servo gearing was interesting- the last servo/gear arrangement appeared to have a larger gear ‘wheel’ on the servo and smaller on the motor- so reducing the mechanical advantage, not increasing it.
Impressive build .
If I understood his commentary correctly, Tom changed the gear ratio to allow for a wider range of movement (not to increase the mechanical advantage).
Yes, he swapped out the servos for more powerful ones to overcome resistance in the pivot, but that also gave some headroom to change the gearing for greater range of motion.
With lightweight PLA (and/or some smart choices in geometry) 3d printed wings can actually be surprisingly light and strong. Whether that’s lighter or heavier than “traditional” model wings depends entirely on how you define “traditional”. It won’t beat a carbon fiber hand lay-up wing, it will probably be just as light or lighter than a rib-and-spar wing with wood or doped fabric covering.
The Wolf Spyder is yet to be made real. It only exists in the simulator. https://www.youtube.com/watch?v=85sHYso8bHE
Meh. Quad tilt-rotors have already been made.
ArduPilot or GTFO.
Ardupilot is great but has a very steep learning curve, and there’s lots of unused code that gets in the way of hacking together a quick solution for a hobbyist project that doesn’t need any of the autonomous features. A different solution for a different type of user
And v22, and other tilt rotor and tilt wing variants have all been developed a while ago on it.
I would of thought adding a simple air brake would help the transition issue?
I wonder if you could print the wings in clear resin and use them as a light pipe to focus the collected photons onto a centrally mounted Stirling generator. 🤔🤔
I have a 1/3rd scale quad tilt rotor. Can’t seem to get thru learning curve in ardrupilot. I want to use all four tilt rotors for complete hover and flight modes. See avatar 1. Already flying in hovering but can’t risk transition to forward flight yet. Thanks for any help.
I’ve just made a comment on this on the YouTube video. I’ll repeat it here.
I am absolutely in awe of this! I don’t know if I am remotely qualified to criticise anything about it, but: Haven’t you got the propellers/rotors spinning the inefficient way? It looks like they increase the flow of high pressure air from the bottoms of the wingtips to the tops (opposite directions at each end). That increases the wing tip vortices. I’m not sure about the Osprey, but the Vought V-173 directed the air from top to bottom, thereby reducing what would otherwise have been very drag-inducing vortices. Clearly the aerofoils produce low drag, but surely the drag could be reduced still further by swapping the propellers over and reversing the motor directions.