An RC VTOL aircraft always makes for a compelling project, but ensuring the transition between hover and forward flight can be quite challenging. In the video after the break, [Nicholas Rehm] demystifies of the flight control algorithm required for a VTOL tailsitter.
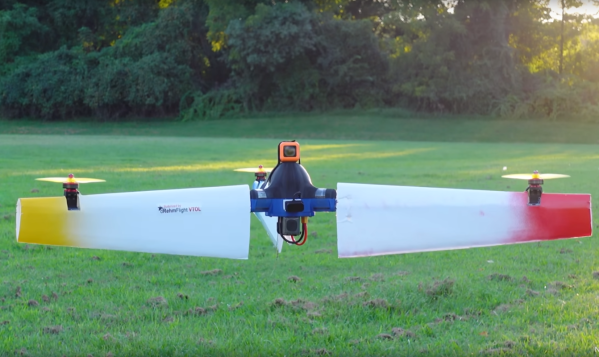
Tailsitters are one of the simplest VTOL arrangements, the testbed here being a simple foam KF airfoil wing with two motors and two servo-controlled elevons. As with almost all his projects [Nicholas], uses of his open-source dRehmFlight flight controller to demonstrate the practical implementation of the control algorithm.
Three major factors that need to be simultaneously taken into account when transitioning a tailsitter VTOL. First off, yaw becomes roll, and vice versa. This implies that in hover mode, elevons have to move in opposite directions to control yaw; however, this same action will make it roll in forward flight. The same applies for differential thrust from motors — it controls roll in hover and yaw in forward flight. Nevertheless, this change of control scheme only works if the flight controller also alters its reference frame for “level” flight (i.e., flips forward 90°). As [Nicholas] demonstrates, failing to do so results in a quick and chaotic encounter with the ground.
With these adjustments made, the aircraft can transition to forward flight but will oscillate pitch-wise as it overcorrects while trying to maintain stable flight; this is due to PID gains – 3rd factor. The deflection required by control surfaces is much more aggressive during hover mode; thus PID gains need to be reduced during forward flight. A final improvement involves adding a brief delay when switching modes for smoother rotation.
For more interesting VTOL configurations, check out [Tom Stanton]’s RC V-22 Osprey, and this solar recharging trimotor