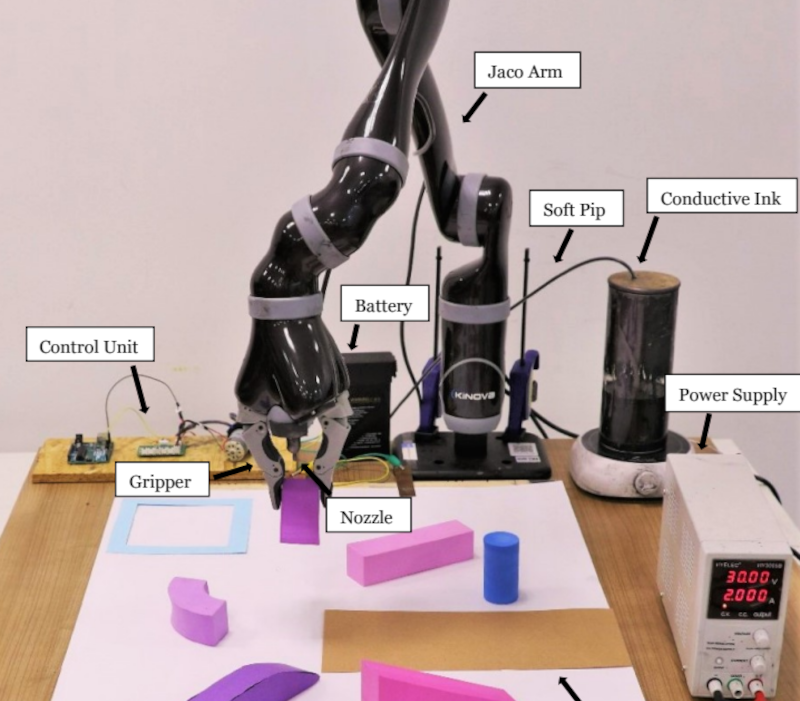
Biological systems often figure out the best ways to get what they need to survive. Now a robot created by researchers at Worcester Polytechnic Institute, Imperial College London, and the University of Illinois Urbana Champaign can make the same claim. The robot operates in front of a plate that has electrical terminals on one end and various obstacles between those terminals and the robot.
The robot can pick up and rearrange some of the items on the plate and then draws paths to the terminals using conductive ink. The effect is the robot gets to “eat” if it solves the connection puzzle.
Admittedly, by itself, this isn’t especially important. Obviously, the machine already has power and it doesn’t really help it to get more power. However, there are many tasks where a robot art might have a task to perform that defies predefinition. This is an example of how software can assess the situation and then create and execute a plan to get the desired result.
Especially impressive was the robot’s ability to move a ramp to bridge a barrier and then draw over the ramp. This isn’t going to revolutionize a pick and place setup, but we could see applications in, say, routing PCBs which is a not dissimilar problem.
Need your own robot arm to play with? We’ve covered a few. Conductive ink not included.














Well, it’s fun, it’s brand-new research, but I can’t see the real point of this. Robots that need energetical autonomy have other better ways to do that already referenced in the linked paper. It “works” in a very controlled setting (the ink dispensing is bad).
Moreover, this article isn’t about a new robot, it’s about an new AI program to pathfind circuits with using a robot.
This is about metasoftware development (software that makes the software), training a neural network to do path finding in restricted/obstructed environments. It’s merely a proof of concept, nothing more which means the robot arm itself is a mere plot device in a hypothetical type of situation.
Research is rarely revolutionary, it’s usually either a minute increment on what we know or verification of what we know. This could be an incremental step toward the development of many different things. One of those things could be routing a circuit to meet certain specifications without human interaction. Another could be automatically generating high-speed interconnects needed to connect to pieces of IP in a VSLI layout.
Science progresses by millimeters, not leaps and bounds.