Yesterday, the Indian Space Research Organization’s (ISRO) Chandrayaan-3 spacecraft performed a powered soft-landing on the Moon, officially making India the fourth country to achieve a controlled descent to the lunar surface. Up to this point, only the United States, China, and the Soviet Union could boast successful landings on our nearest celestial neighbor.
What’s more, Chandrayaan-3 has positioned itself closer to the Moon’s south pole than any other mission in history. This area is of great interest to scientists, as there is evidence that deep craters in the polar region contain considerable deposits of frozen water. At the same time, the polar highlands receive almost constant sunlight, making it the perfect location to install solar arrays. These factors make the Moon’s south pole an ideal candidate for a future human outpost, and Chandrayaan-3 is just one of several robotic craft that will explore this area in the coming years.
But as is usually the case with space exploration, the success of Chandrayaan-3 didn’t come easy, or quickly. The ISRO started the Chandrayaan program in 2003, and launched the Chandrayaan-1 mission in 2008. The craft successfully entered lunar orbit and surveyed the surface using a wide array of instruments, many of which were provided by foreign space agencies such as NASA and the ESA. In 2019 the far more ambitious Chandrayaan-2 mission was launched, which included a lander and small rover. While the orbiter component of Chandrayaan-2 was a complete success, the lander crashed into the Moon’s surface and was destroyed.
With Chandrayaan-3 now safely on the surface of the Moon, there’s much work to be done in the coming days. The planned mission lifetime for both the lander and rover is a single lunar day, which equals just about two weeks here on Earth. After that, the vehicles will be plunged into a long stretch of frigid darkness which they likely won’t survive.
Lander Lessons
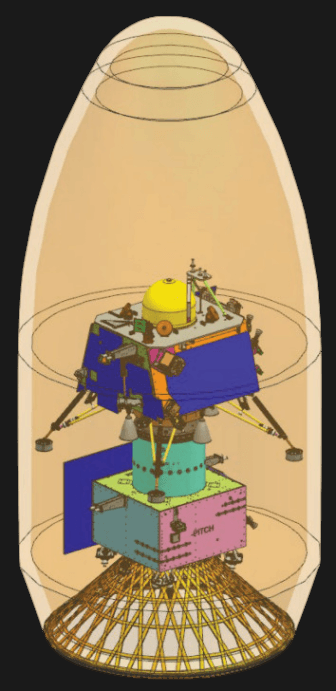
The lander component of Chandrayaan-3, known as Vikram, measures approximately 2 meters (6.5 feet) on each side and has a total mass of 1749.86 kilograms (3857 pounds). The design is very similar to that of its 2019 predecessor, but ISRO made several modifications to improve not only the reliability and accuracy of the onboard systems, but the structural strength of the lander itself.
 One of the most obvious changes is the arrangement of its rocket engines. On Chandrayaan-2, the lander had one central fixed-thrust engine, and four variable thrust engines on the periphery with vectoring capability. The idea was that the center engine would do most of the work to slow the craft down, while the outer engines would provide attitude control. Unfortunately, this arrangement proved sluggish during the previous landing attempt.
One of the most obvious changes is the arrangement of its rocket engines. On Chandrayaan-2, the lander had one central fixed-thrust engine, and four variable thrust engines on the periphery with vectoring capability. The idea was that the center engine would do most of the work to slow the craft down, while the outer engines would provide attitude control. Unfortunately, this arrangement proved sluggish during the previous landing attempt.
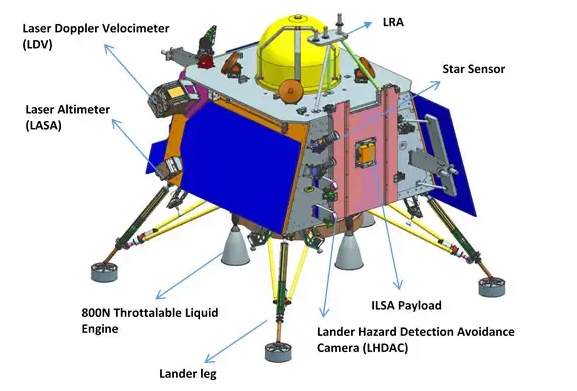
For Chandrayaan-3, ISRO engineers removed the central rocket engine and improved the vectoring ability of the four outer engines. This allowed the new lander to more rapidly adjust its attitude in the final moments before touchdown. The new lander also featured an upgraded Laser Doppler Velocimeter (LDV) that was able to provide more accurate positional data during descent.
While the lander’s primary function is arguably to deliver the mission’s rover, it does feature onboard scientific payloads of its own. This includes Chandra’s Surface Thermophysical Experiment (ChaSTE), which will study the temperature of the lunar surface, the Instrument for Lunar Seismic Activity (ILSA) which aims to detect quakes within the Moon’s interior, and the Langmuir Probe (LP) to measure near-surface plasma density.
Rover Do-Over
While the crash of Chandrayaan-2 resulted in modifications being made to the lander, there was no reason to believe the mission’s rover wouldn’t have worked as expected if it had been deployed. As such, the six-wheeled Pragyan rover on Chandrayaan-3 is identical to its predecessor, down to the same scientific payloads.
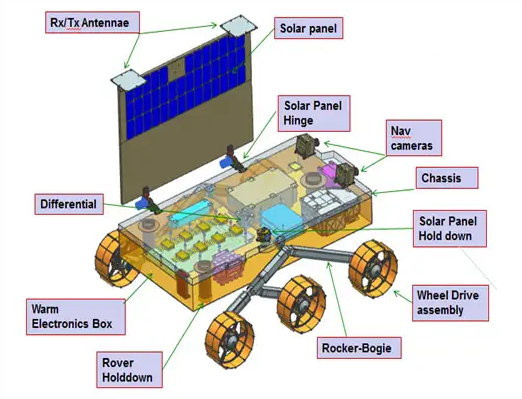 Outwardly similar to NASA’s Sojourner Mars rover, Pragyan has a mass of 26 kg (57 lbs) and measures roughly 92 cm (3 feet) by 75 cm (2.4 feet). It features stereoscopic vision thanks to a pair of one megapixel monochromatic NAVCAMs mounted on the front of the vehicle, which provides ground controllers with a digital elevation model of the terrain ahead.
Outwardly similar to NASA’s Sojourner Mars rover, Pragyan has a mass of 26 kg (57 lbs) and measures roughly 92 cm (3 feet) by 75 cm (2.4 feet). It features stereoscopic vision thanks to a pair of one megapixel monochromatic NAVCAMs mounted on the front of the vehicle, which provides ground controllers with a digital elevation model of the terrain ahead.
Each of the six wheels that make up the rocker-bogie suspension system has its own independent brushless DC motor for redundancy, and can propel the rover at a rate of one centimeter per second. Since the rover uses the lander as a communication relay, it’s expected to remain within a 500 meter (1640 feet) radius of the landing site for the duration of its mission.
In terms of science hardware, the rover is carrying a Laser Induced Breakdown Spectroscope (LIBS) and the Alpha Particle Induced X-ray Spectroscope (APXS). Both devices will be used to determine the elemental composition of the lunar soil and any rocks the rover encounters. While it’s hoped that Pragyan will be able to find and directly examine frozen water on the lunar surface, there’s obviously an element of chance involved, especially given the mission’s relatively brief operational period. As such, the mission will achieve its scientific goals even if it doesn’t encounter any ice.
One Small Step
Over the next two weeks, we should expect a flurry of images from the ISRO as Pragyan explores the landing site. And we’ll see twice as many if the rover manages to identify frozen water. With Chandrayaan-3, India has demonstrated to the world that they’ve become a major player in space, a victory that’s all the more impressive just days after Russia’s failed attempt at putting their own lander on the Moon.
But this isn’t the end of India’s lunar ambitions. Planning is already underway for Chandrayaan-4, which will be a joint mission with Japan’s Aerospace Exploration Agency (JAXA) launching sometime between 2026 and 2028. The mission will utilize a larger lander that’s capable of bringing at least 350 kg (770 lb) of hardware to the lunar surface, and a rover that features a drill for collecting sub-surface samples. It’s also expected that the the mission will demonstrate techniques for surviving the long lunar night, which will be critical for long-term exploration.
Between Chandrayaan-4 and the other landers currently slated to touchdown around the Moon’s south pole before the end of the decade, this is an exceptionally exciting period of international space cooperation. If all goes according to plan, these robotic vanguards will play a key role in establishing humanity’s long-awaited lunar outpost.














I wonder if future Moon rovers will be based on Star 266 chassis. It’s very durable and could do the job much better than yet another soapbox.
Definitively, no. It’s too heavy and it’s not even designed for lunar terrain.
Just because it wasn’t designed for that particular environment doesn’t mean it won’t do the job. Wheels from KrAZ 255 would’ve been nice but otherwise it should serve Polish Moon Outpost just fine.
I assume you meant this ironically, right? But if not, that would be a pretty damn absurd idea.
Concider the exuberant financial and opportunity cost of enabling *anything* to be put on the lunar surface in general. Then the utterly wild cost and complexity increase “per gram” being launched, transited, deaccellerated and navigated upon approach / orbit / positioning, and safely landed on the surface. And yet another time reminding of the _opportunity_ cost as well.
With this in mind, even if only considering how much of the mission cost is frankly the mass of the payload – the mere notion of using something “that could possibly do the job” instead of something *made FOR the job*, is folly when you actually have the choice. But folly becomes utterly bonkers when suggesting doing so with something that is 7 times the mass of the largest rover ever launched to date – and that’s only counting its chassis. Not even including any means of motion, much less any functional mission payload 😂
Stupid question… if it has an independent motion on each wheel, why does it have a differential?
Differential will be for keeping the chassis from rotating about while allowing the rocker-bogies on each side to tilt over rough terrain.
The rocker bogie suspension requires a differential for stability, to average the difference between the rockers.
It’s not for the driven wheels themselves but is a key part of the suspension. It’s explained in https://en.wikipedia.org/wiki/Rocker-bogie
The differential couples the motion of the left and right rockers connecting the suspension to the vehicle to prevent it from tipping over front-to-back. It’s the same mechanism as a car differential, but used for a different purpose. https://alicesastroinfo.com/2012/07/mars-rover-rocker-bogie-differential/
That’s a good explanation of it. Very cool
Is this on the dark side of the moon?
There is no dark side of the moon, really. As a matter of fact, it’s all dark!
Well, the “far” side does have more cratering, therefore smaller mares (seas) which reflect more light than craters.
It’s pretty dang close to the south pole, but it’s still on the moon’s earth-facing side.
The near side of the moon is kept that way by a fascinating phenomenon called tidal locking. Also interesting is that the visible near side varies somewhat over time due to libration caused by the eccentricity of its orbit.
It’s on the near side, close to the South pole: https://geohack.toolforge.org/geohack.php?pagename=Chandrayaan-3¶ms=69.367621_S_32.348126_E_globe:moon
No. It’s near the south pole, on the side facing toward Earth. If it were on the dark side (the side facing away from Earth; the Moon is tidally locked to Earth so we always see the same side of it), they would have needed a communications relay to send and receive data with Earth because the Moon would block radio signals.
The Moon does not have a dark side in the sense of a side that always faces away from the Sun. It is tidally locked to Earth, not to the Sun. The side we call the dark side is likely marginally darker because it never receives light reflected by Earth; both sides receive the same amount of light from the Sun.
Mercury, in contrast, is tidally locked to the Sun, so it has a true light side and dark side. It might be possible to land a mission on the dark side, though it would face some major technical challenges. It would have to get rather close to the Sun to arrive on Mercury, so it would have to be capable of surviving those conditions, and sorting out its radio signal from all the radiation from the Sun would be challenging. Landing a mission on the light side would not be feasible with current electronics technology; the heat there would destroy all the electronics very quickly.
“Mercury, in contrast, is tidally locked to the Sun, so it has a true light side and dark side.”
What? No.
Mercury *is* in a tidal resonance with the Sun, but it is not in synchronous rotation (a 1:1 resonance). Mercury is locked in a 3:2 resonance with the Sun: its orbital period is 87.9691 days, and its rotational (sidereal) period is 2/3rds of that. It does not have a true “light side” and “dark side.” Which sucks, because if it *did*, you’d have a nice target on the terminator where it’d be relatively easy to land something indefinitely, as opposed to being baked and frozen.
Mercury’s synodic day – the apparent day on the surface – is 176 days, or twice the year length. Obviously since it’s a 2/3rds resonance, after 87.9691 days the “wrong” side is now facing the sun (it’s rotated 1.5 times), and so it needs to orbit the sun again to get back to its original orientation.
Synchronous rotation (a 1:1 resonance and an infinite synodic day) with a star is actually harder than you might think, because:
1. You pass through all other resonances when spinning down. Gravitational tides result from the deformation of the solid body – if the deformation timescale is long enough, higher order resonances can be stable as well.
2. Gravitational tides aren’t the only forces acting on a planet.
For 2, the daily solar heating cycle (atmospheric tides) also drive a torque on the planet which is *against* the gravitational tides. Basically, the solar heating pushes the atmosphere to the colder side, which means the “bulge” formed is oppositely aligned to the gravitational tides.
This is thought to be why Venus (the planet with the longest synodic day) isn’t fully in a 1:1 resonance, for instance – and it doesn’t apply to moons of planets, which is why they are often in synchronous rotation.
It landed on the lunar surface, not in a record store.
B^)
It’s not a time machine.
Record store?
No, it’s on the near side.
I think it is more of an edge case.
B^)
Why do you believe “they lied and said last lander touched down..until NASA found the crash site” or where did you come across these lies ?
For those that also wondered how close to the pole it landed: 69.367621°S 32.348126°E according to Wikipedia.
For a comparison, the Nordkapp’s latitude is at 71N
case of sour grapes?
The crash site was found by an Indian! NASA themselves give credit. https://www.nasa.gov/image-feature/goddard/2019/vikram-lander-found
dont feed the trolls.
I wonder if it’ll encounter the set where the first moon landing was filmed?
Would a human lunar base near a lunar pole be more protected from solar storms than an equatorial one? Just wondering
Yes, somewhat – in the sense that the same material that’s blocking the sunlight also blocks energetic particles. Not a *ton* more protected, though. Doesn’t take much to block light.
That mention of 4th country makes me wonder if it were possible to go to the moon sneakily.
I mean if you deliberately wanted to go there secretly, would it be doable you think? I think probably yes, although you’d have to spend some on a decoy mission.
The Nazis and Moonraker have already done it.
B^)
‘happy’? Oh really.
i love space stuff. but i really think India has more important things it could be doing now, rather than lunar exploration. especially when one considers that between 2016 and 2021, around £2.3 billion in UK aid went to India. it takes the piss a bit, presumably making my benefits payments smaller to help India explore the moon.