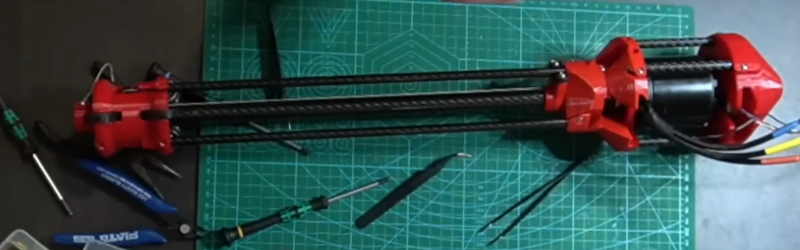
[Harrison Low] published some 3D-printed linear actuators, which generated a lot of interest. He got a lot of advice from people on the Internet, and he took it to heart. The result: an improved version that you can see in the video below.
The original design used carbon fiber and Kevlar and was quite stiff. The actuators could move very fast, which was important to [Harrison]. However, they were also prone to wear and had issues with the force required to assemble them. He also wanted the design to be more modular to facilitate repair. The new design removes the bowden tubes, and the resulting actuator is both easier to assemble and easier to service.
One of the great things about 3D printing is you can iterate quickly, incorporating lessons you learn into new revisions. The old actuator, for example, failed after 39,000 cycles. The new ones were able to make 50,000 cycles and didn’t seem to be worse for the wear.
[Harrison] is looking at some future improvements, including using the motor body as one of the spools and switching to synchromesh cable. He’s looking for suggestions for the next generation, so be sure to share your ideas and experience.
If you want to make your own, the last part of the video shows detailed assembly instructions. It looks like they would be worth watching as the assembly isn’t trivial.
If you want something easier to put together, maybe try one hosted on a PCB. Or, there are other designs, many of which are quite inexpensive.














This actuators could be an inovation on love life toys, it looks more elegant than these bulky ones. Could you put a thicker Rod in the middle? And how much force comes out?
There is a failed start up with a female engeneer which develped a vibrator with the acuators from satelites (these which move the solar cell panels).
Those heavy, bulky ones are cheap to manufacturer, simple, reliable, and can handle the bending stresses out upon them by bodies squirming at the end of a lever arm. Improvement is hard.
put*
Why people even use it?
Actual (tubular, high torque)linear motor exist.
But expensive.
They’re cost almost same as ordinary 3-phase induction (or PM) motor which is obvious consider it is 3-phase induction (or PM) motor just in tube/torus/cube/rectangular cuboid etc. package.
Aaaand now HaD is now on Mom’s for “Liberty”s ban list.
Awesome! Carry on!
You must be fun at parties
This guy made a video about homemade linear actuators (previously linked on HaD), takes audience ideas/criticisms to heart, makes improvements, and releases a new 18 minute in-depth overview of the changes called “My new linear actuators are SO MUCH BETTER.”
And your take is the video is “clickbait?” I think you need to re-evaluate your definition.
Dude’s a troll with a long history of inane, contextless, old-man-yells-at-cloud comments. You learn to ignore him.
I have always really liked this approach to linear actuators. It has a couple really cool advantages, such as easily adjustable mechanical advantage (simply by changing spool diameters) without altering the actuator’s footprint. Another possibility would be a tapered spool, so that the start and end of the stroke have different mechanical advantages… although this would require a robust winding guide to make sure the cable is winding around the correct portion of the spool. Or perhaps a deep spiral groove around the spool would be sufficient to keep the cable constrainted during winding/unwinding?
RISE Robotics has an interesting concept similar to this actuator, with the addition of multiple loops of cable with pulleys (e.g. block & tackle) along the actuator axis:
https://www.youtube.com/watch?v=Rp_kmhphpyk
Thanks for sharing that video.
LOL! @ “You will lose speed.” – High-speed is THE core requirement for this project.
What a stupid hot take.
Great video.
Very interesting, thanks! The resulting actuator looks very good that I would use if I had a project requiring it. I have also seen the first version and I appreciate the video and effort put into it. Harrison’s persistence on the project is also admirable.
I don’t know whether you entertained the idea of using a linear motor that could directly drive the actuator? I am very interested in linear actuators that is why it came to my mind. The problem with linear motors is that you can not find so many off the shelf solutions as for rotating motors.
How good is his actuator? Endurance of 50K cycles with no load? Precision numbers look equally questionable seeing his data plot. Looks like a good solution for grade school animatronics project trying to get kids excited about STEM.
Yeah this project feels a lot like an enthusiastic amateur re-inventing a very well developed wheel and re-discovering all the reasons the wheel is made that way.
Not that there’s not space for different designs & ideas but most often the right answer will be how they’re all made already.
I would prefer a planar actuator above a linear. In a University in the Netherlands they build such a actuator. A home brew version would be very useful.
An alternative linear motion tech is the Cascade Drives rack and pinion system that can operate at speeds and forces that neither hydraulics nor roller screw can. It has some slight disadvantages due to some dead length in the gearbox, but extremely easily scaled in size.
https://youtu.be/Nm4I5MILEh8?si=IqgQVmi8jd2xutP3