It would be better if humans didn’t toss cigarette butts on the ground in the first place, but change always takes longer than we think it should. In the meantime, researchers at the Italian Institute of Technology have used the problem as an opportunity to explore what seems to be a novel approach: attaching vacuum pickups to a robot’s feet, therefore removing the need for separate effectors.
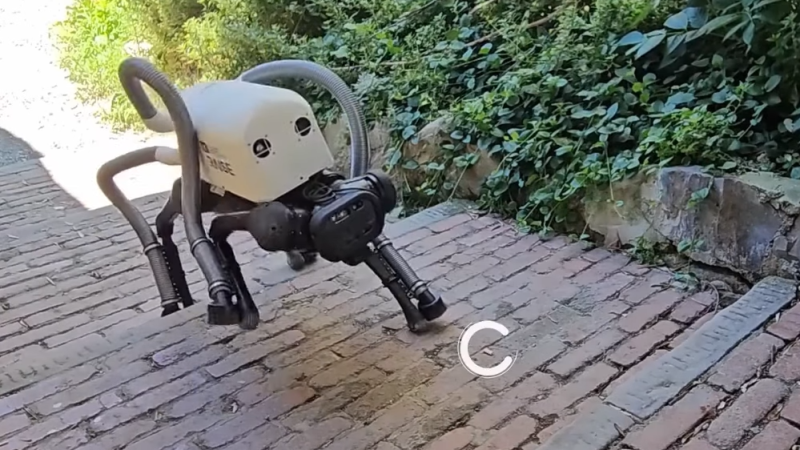
 VERO (Vacuum-cleaner Equipped RObot) is a robotic dog with a vacuum cleaner “backpack” and four hoses, one going down each leg. A vision system detects a cigarette butt, then ensures the robot plants a foot next to it, sucking it up. The research paper has more details, but the video embedded below gives an excellent overview.
VERO (Vacuum-cleaner Equipped RObot) is a robotic dog with a vacuum cleaner “backpack” and four hoses, one going down each leg. A vision system detects a cigarette butt, then ensures the robot plants a foot next to it, sucking it up. The research paper has more details, but the video embedded below gives an excellent overview.
While VERO needs to think carefully about route planning, using the legs as effectors is very efficient. Being a legged robot, VERO can navigate all kinds of real-world environments — including stairs — which is important because cigarette butts know no bounds.
Also, using the legs as effectors means there is no need for the robot to stop and wait while a separate device (like an arm with a vacuum pickup) picks up the trash. By simply planting a foot next to a detected cigarette butt, VERO combines locomotion with pickup.
It’s fascinating to see how the Mini Cheetah design has really become mainstream to the point that these robots are available off-the-shelf, and it’s even cooler to see them put to use. After all, robots tackling trash is a good way to leverage machines that can focus on specific jobs, even if they aren’t super fast at it.














Smokers always declare themselves as being very social, as they will chat with random other addicts in their designated smoking areas, sometimes even giving out their poison.
If I look at how the floor looks in those areas I have other thoughts about them.
I was even more surprised to see how hostile they act if you point out their littering behavior. I had a colleague refusing to pickup his cigbutt at the train station until I told him “I’m willing to miss a train to make a point of you picking up your litter, are you?”
I am not surprised. If you have that little regard for your own health and wellbeing, how much can you expect towards society as a whole and fellow humans?
We need a robot that sucks up the person with cigarette butt and spits them out like the war of the worlds tripods. No more mess.
Great idea, but even better would be to somehow pick up dog poo. I could foresee a few problems – 1. Dog poo is a relatively amorphous vision task so harder to spot than cig butts. 2. It’s going to create a hell of a mess in the vacuum tubes and storage container.
There are vehicles designed for that task, just not autonomous:
https://www.jeanheybroek.com/groentechniek/categorieen/poepzuiger/
Awesome !!!!!
I really want to like this project, but I’d rather viciously attack each and everyone who builds more leaf blower noise generators.
Vacuuming like that isn’t even a good idea to begin with. If the front legs can do it, there is no need to also add tubing to the hind legs.
Not building a suction tool that is also the foot pad means the placement will be wrong or the robot can snag on the suction tool. Try to make it work around train stations where there is a mixture of cigarette butts and coarse gravel around the tracks.
Some pieces of litter stick to the ground because they got wet or walked on. To be able to paw at stuck bits, the suction tool with bristles must be in contact with the ground.
But wait, it gets worse.
“the researchers suggest a variety of other potential use cases, including spraying weeds in crop fields, inspecting cracks in infrastructure, and placing nails and rivets during construction.”
That’s just silly and likely coming form someone who has neither held a nail gun, tended to crops or even used a vacuum cleaner in their entire life.
Oh, I forgot: wherever needs to be cleaned, the robot must walk over, so it’s going to have a hard time reaching over and around obstacles. In German cities, there’s a fair bit of small debris around and under parked cars. So, at the very least, make it so it can crawl under cars, where it can then also hide from people, as it should.
It’s just wankery, they wanted to get a robot platform and came up with some stupid use-case to justify it, or it’s done in cooperation with some company for marketing stuff.
There’s no way anyone thinks this is a realistic, efficient, useful way to vaccuum stuff up. Even in the demos you can see the cigarettes are just coincidentally in the place the robot will walk over..
Maybe you missed the part where it works on a beach, with more gravel than a train station.
They could have gone with a cute elephant design. But no, they had to go with the octopus sodomizing a dog look.
Cannot unsee. Thanks.
My job here is done.
I hear that is a popular subgenera in Japanese pornographic manga.
Lol
I like the concept of attaching vacuum hoses to it’s legs. It’s walking very stiff at the moment, but that is just a software update to fix.
To be really practical it would have to be able to pick up more differentiated litter. plastic bags and orange peelings for example, and dog poo as also already mentioned. Aluminium cans are becoming less common litter now single use cans have a deposit system where I live (Ridiculously enough, you can not dent the can because then the deposit system can not recognize the can anymore)
Making it smaller so it can crawl under cars may also happen. At the moment it looks just like a proof of concept.
Robot: What is my Purpose?
Creator: You pick up cigarette butts.
Robot: (heavy sigh)
Creator: Oh, and dog poo too.
That’s what I’ll reincarnate as…
My Mom smoked Winston 100s, and my Dad Chesterfield Kings.
In the winter, the windows being up didn’t slow them a jot.
I resent being woken up and dragged to church where I would gasp for breath.
By my late 30’s, they were both dead.
Now I’m having trouble breathing having never picked up a cancer stick.
pls get tested for COPD. Early treatment is best.
It’s all nice and easy when the cigarette butt is on a clean surface, but most often they are wedged between stones, or dropped on the curbside between other litter. The other litter tends to clog the vacuum cleaner pipe (tried this with a 36V black 7 decker cordless vacuum). But hey, as a first prototype, it sure is interesting.
As for speed, two weeks ago we had a national cigarette butt cleanup day. With 17 people we picked up 16.500 cigarette butts in 2 hours. But as long as smokers will keep dropping them everywhere, it’s “dweilen met de kraan open”
Australia just taxes them to heaven. Its $2 a stick.
Some health insurance companies charge a hefty extra on the premium for smokers. That includes the health insurance I get through work, the nonsmokers enjoyed 3 years of no premium increases…
Cigarette butts are about the right length to get stuck in a lot vacuum hoses if caught crosswise.
This does beg the question of how far away a LMM (Large Movement Model) is. AI has gotten quite a ways on LLM’s, but it feels like it would be pretty easy to have an AI watch a bunch of videos of animals moving and then be handed some kinematics and some sensors and sent out to learn to walk.
This, as mentioned above, is kind of least common denominator movement – every leg has to jump high to not snag rather than checking the camera to see if there is a snag risk, etc. Obviously line coded
Now make a robot dog with a leaf blower on its legs, that way the two of them can play together.
It looks like an octopus
Since people will always be the way they are.. how about biodegradable butts and a mandate to use them?
As I don’t smoke, I’m opposed to being mandated to use them!
B^)