If you’re used to thinking about 3D printing in Cartesian terms, prepare your brain for a bit of a twist with [Joshua Bird]’s 4-axis 3D printer that’s not quite like anything we’ve ever seen before.
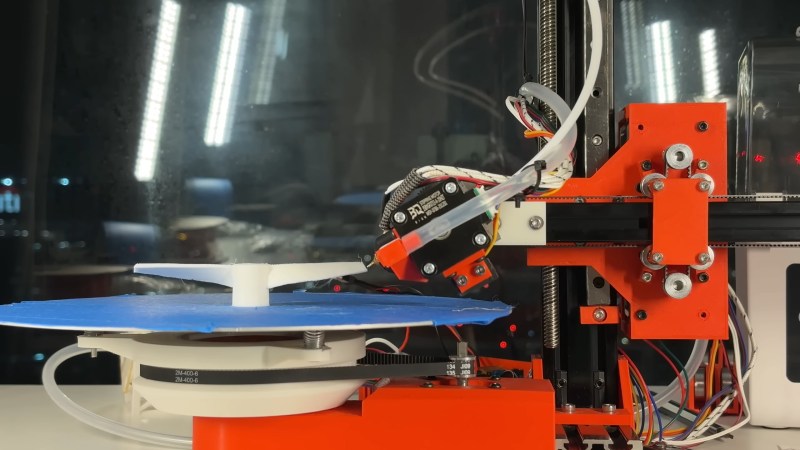
The printer uses a rotary platform as a build plate, and has a linear rail and lead screw just outside the rim of the platform that serves as the Z axis. Where things get really interesting is the assembly that rides on the Z-axis, which [Joshua] calls a “Core R-Theta” mechanism. It’s an apt description, since as in a CoreXY motion system, it uses a pair of stepper motors and a continuous timing belt to achieve two axes of movement. However, rather than two linear axes, the motors can team up to move the whole print arm in and out along the radius of the build platform while also rotating the print head through almost 90 degrees.
The kinematic possibilities with this setup are really interesting. With the print head rotated perpendicular to the bed, it acts like a simple polar printer. But tilting the head allows you to print steep overhangs with no supports. [Joshua] printed a simple propeller as a demo, with the hub printed more or less traditionally while the blades are added with the head at steeper and steeper angles. As you can imagine, slicing is a bit of a mind-bender, and there are some practical problems such as print cooling, which [Joshua] addresses by piping in compressed air. You’ll want to see this in action, so check out the video below.
This is a fantastic bit of work, and hats off to [Joshua] for working through all the complexities to bring us the first really new thing we’ve seen in 3D printing is a long time.
Thanks to [Keith Olson], [grythumn], [Hari Wiguna], and [MrSVCD] for the near-simultaneous tips on this one.














The real difficulty with these usually is in the slicing. As far as I know there are no open source (or even inexpensive) slicers that do >4 axis. Maybe one can hack something together with G-Code bending if they don’t want to program by hand?
Correction: >3
Well the dude did that too in the video
See Dan’s comment below for an interesting development that’s counter to my comment.
I’ve been in IT for 40 years and only been 3D printing for a year. I must say that I’m impressed with this device. This takes 3D printing to another level. Excellent prototype and hope you sell some.
There is no problem to build exotic multi-axis cnc. Sofware is a blackhole.
I often wondered if it made sense to have a rotating base with a delta bot head, potentially cutting down on accelerations needed. This one went in a different direction.
Guy posted this on reddit. He’s also cooked up a slicer.
https://github.com/jyjblrd/Radial_Non_Planar_Slicer
Guy posted this on reddit. He’s also cooked up a slicer.
https://github.com/jyjblrd/Radial_Non_Planar_Slicer
Now THAT’S really cool. We’ve seen multi axis 3D printers before, and every single time it was just “cheated” to work on very specific models. A generic slicer for multi axis is really what should have been highlighted in this article.
I hope this takes off…
Yeah this could be a very valuable piece of work, very impressive. I especially enjoyed in the video how he went “unfortunately, this geometry would be impossible to print… Just kidding, I solved that and here it is printing that geometry.” Classy
Nice video, great idea, successful implementation!
This is one of the most nifty things I’ve seen in quite a while. The software must be an absolute nightmare!
As you can tilt the extruder nozzle so it is extruding horizontally, how about putting the entire machine on an additional tilt mechanism so that the nozzle stays vertical (regardless of the tilt your slicer has requested) so then gravity is ALWAYS on your side (always pulling “down”) when building. That way you could build models that have horizontal segments without any support.
Then you need to hold your model for those rotations after a certain height, and you should probably account for the deflection of large models in such positions, otherwise you could dramatically exceed the specified layer height. Deflection is minimal at the extruder head where the mass is known and fixed, and the axes are stiff, do it makes sense to do it there.
It seems to do horizontal just fine without the additional axis and complexity (including a considerable problem with stiffness if you are moving that much mass)
I don’t really understand the video. First he explained that he hacked a slicer together where he deforms the mesh, then slices in cura, then inverses the transform on the G-Code. This is what is on github.
But then he also says “it’s not generalizable to all models” to follow up with “I did an optimization based slicer to prevent printing supports”. But that one is not yet released or shown is it?
The compressed air cooling might be something worth adopting, I can imagine having a small fridge compressor or something under the bench and a bit of flexi tubing might deliver a much more forceful cooling effect without large fans & ducts .
Interesting design!
Well, he did adopt it, so yeah…
That is something I thought about awhile back when reading about all the work people were doing to lower print head mass for higher speeds. So I’m happy to see someone try it out and would love to see more investigation into it.
You can buy systems like this. Berd-air is one version of it
Heck, my laser cutter already has one ready to go. I would just need to fix up some kind of quick disconnect to pass it back and forth between machines. Or get a second one.
I’m wondergin what slicer was used on the “open5x” projerct? I remember some very nice videos of a Voron and an E3D toolchanger modified to 5 axis, running a Duet board, printing even multi materials
A script made with Grasshopper in Rhino 3D
This mechanism looks like it would have fairly decent stiffness for a 4-axis subtractive machine, too.
That’s a great idea… He should put a little endmill on there and try it
Alright Bambu, balls in your court!
Joshua, you print (think) out side the box, onya!
I look forward to further developments and branches. Too old (75 years young) I to push the development further, however I must build one to see it eorking in the “metal”?