Having an enclosed 3D printer can make a huge difference when printing certain filaments that are prone to warping. It’s easy enough to build an enclosure to stick your own printer in, but it can get tricky when you want to actively control the conditions inside the chamber. That’s where [Jayant Bhatia]’s Chamber Master project comes in.
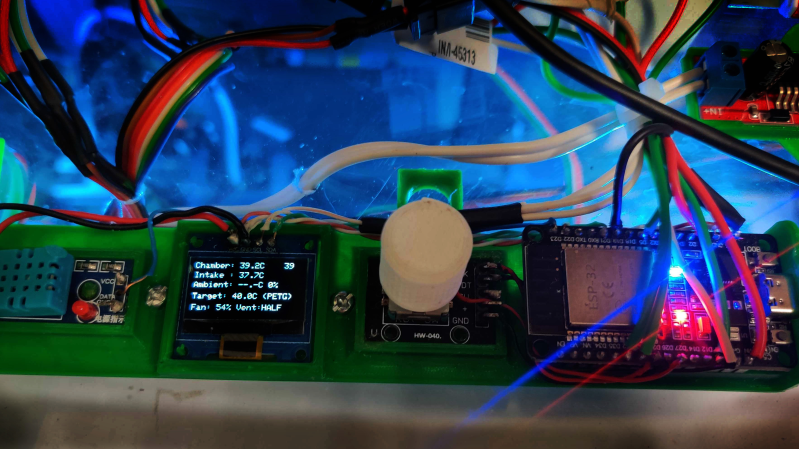
This system is built around the ESP32 microcontroller, which provides control to various elements as well as hosts a web dashboard letting you monitor the chamber status remotely. The ESP32 is connected to an SSD1306 OLED display and a rotary encoder, allowing for navigating menus and functions right at the printer, letting you select filament type presets and set custom ones of your own. A DHT11 humidity sensor and a pair of DS18B20 temperature sensors are used to sense the chamber’s environment and intake temperatures.
One of the eye-catching features of the Chamber Master is the iris-controlled 120 mm fan mounted to the side of the chamber, allowing for an adjustable-size opening for air to flow. When paired with PWM fan control, the amount of airflow can be precisely controlled.










The project looks cool, and I was interested in how he made it. Mostly as I was wondering how it keeps a constant temperature across the whole build volume. This isn’t trivial, or at least not at fractions of a degree. This project doesn’t seem to have any of that, and is mainly a vibe coded control system. A state machine determined by the state of the vent and the delta in temperature determines what the vent should be. E.g. “VENT_START_WAIT_CLOSED_AGAIN”.
The printer itself has control loops (likely PID) on both the nozzle and heated bed. Layering another control on top is not ideal, even more so if your control can effectively only control the cooling. When you do, it’s important to make the control loop a magnitude slower, as not to influence the other loops. But, with this whole project, I believe that the printer can be modded to include heated chamber control. And if you must, just program a PID with a temperature sensor and control over the vent/fan. This would be a library and very simple code. A PID also adjusts for external factors like your room temperature, which the current system can’t.
“When you do, it’s important to make the control loop a magnitude slower, as not to influence the other loops.”
This is wisdom. It’s essential guidance for any project where the goal is to provide a stable environment for another system.
That’s such a cool project and the voice of the narrator is Hollywood quality. Well done
Welcome to modern AI voiceover. Ick.
I wonder why the accent drifts through the narration. Creepy.
I’ve noticed accent drift or an abrupt change in tone/levels more often once YouTube said they were going to enhance their AI policies. It could be coincidental or it might be a technique to try and get around the detection mechanisms.
Tune in to the Turbo Encabulator next.
Hi Andrew,
Apparently you know a thing or two about Encabulation and the difficulty of making advancements in this field. We have created an Encabulator named the “Adjunctive Synchronous Skyrmion” (encabulator.) We are still looking for a better name or acronym for it.
Here are some brief technical details for your perusal. Perhaps you can shed some light on what we might be doing wrong that prevents us from obtaining verifiable proof of our success:
The Adjunctive Synchronous Skyrmion Encabulator achieves unprecedented stabilization through a reciprocating dingle-arm synchronized with a logarithmic casing. By modulating chiral spin-textures within a non-abelian gauge field, the device mitigates side-fumbling of the lunar waneshaft. Crucially, the system utilizes a proprietary “Schrödinger-Gasket” to maintain quantum coherence. However, engineers noted a persistent Heisenberg-offset: the skyrmion lattice maintains its topological charge only until an operator engages the viewing port. The moment the waveform is observed, the phase-conjugate interference collapses into a localized eigenstate, causing the panametric fam-clutch to seize. Thus, the project remains theoretically perfect, provided no one actually looks at it.
Doesn’t Octoprint do this anyway?
For users running Marlin, there’s already a more robust option available. Recent Marlin versions support native heated chamber control (chamber temp sensor + PID), which is a better architectural fit than adding an external controller on top of existing hotend/bed control loops.
For ABS specifically, avoiding internal air currents is critical. Even low, PWM-controlled airflow introduces convective gradients that can increase warping and layer stress. Regulating chamber temperature via ventilation works against that goal.
A slow PID-controlled heater inside a well-sealed enclosure is usually the correct solution: no forced airflow during printing, large thermal time constants, and integration into the firmware’s existing control model. This also naturally compensates for ambient temperature changes, which state-based vent control cannot.
Overall, it’s a nice project and a clever implementation, especially from a UI and usability standpoint. An actively ventilated, sensor-driven chamber like this could be very useful for applications where airflow is desirable, such as filament drying or incubation-type environments. For ABS printing specifically, though, minimizing internal air movement tends to matter more than fine-grained airflow control.