Designing a bi-pedal robot is a relatively straight forward task, given the array of tools that we now have at our disposal. There are many open source examples out there for anyone to get started. Designing one that doesn’t fall over a lot… well that’s not so simple. This is because when we walk our center of balance is constantly shifting, so during our adolescence we learn to shift our body weight around to maintain a stable center of balance. By the time we hit our mid-teens most of us have mastered the art of walking, and can maintain stability even through intense movements such as seen in many sports.
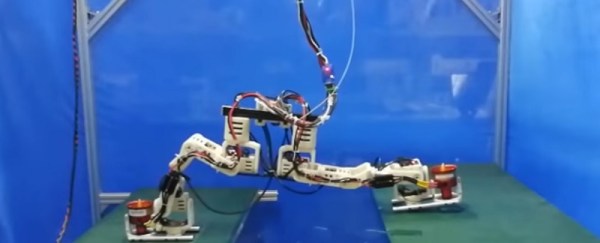
The question is of course, how does one convey this type of learning into a bi-pedal robot? It’s not easy to say the least. Take a look at what the robotics team over at Guangdong University of Technology’s School of Automation in China are doing. They’ve strapped a pair of ducted fan jet engines to the feet of a bi-pedal setup. What this does is allow the robot to maintain its center of balance over a large distance. Generally we see bi-pedal robots “tip toe over egg shells” because they need to keep the center of balance as stable as possible. By applying a thrusting force that comes out of the foot; they’re able to maintain center of gravity even though the robot is extended well beyond its normal range of motion.
Be sure to check out the video below for an excellent demonstration. Sometimes Hollywood does hackers a great service by giving us some inspiration!









