Designing a bi-pedal robot is a relatively straight forward task, given the array of tools that we now have at our disposal. There are many open source examples out there for anyone to get started. Designing one that doesn’t fall over a lot… well that’s not so simple. This is because when we walk our center of balance is constantly shifting, so during our adolescence we learn to shift our body weight around to maintain a stable center of balance. By the time we hit our mid-teens most of us have mastered the art of walking, and can maintain stability even through intense movements such as seen in many sports.
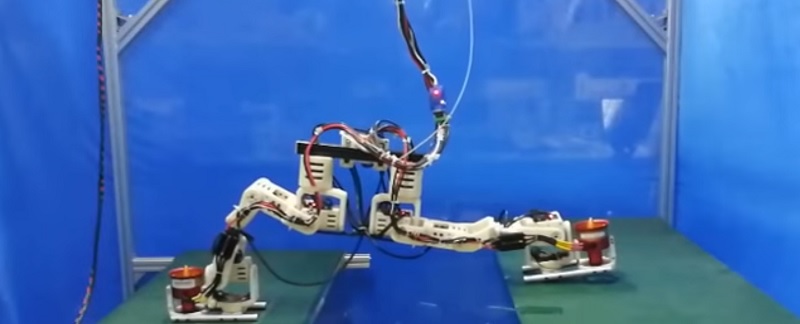
The question is of course, how does one convey this type of learning into a bi-pedal robot? It’s not easy to say the least. Take a look at what the robotics team over at Guangdong University of Technology’s School of Automation in China are doing. They’ve strapped a pair of ducted fan jet engines to the feet of a bi-pedal setup. What this does is allow the robot to maintain its center of balance over a large distance. Generally we see bi-pedal robots “tip toe over egg shells” because they need to keep the center of balance as stable as possible. By applying a thrusting force that comes out of the foot; they’re able to maintain center of gravity even though the robot is extended well beyond its normal range of motion.
Be sure to check out the video below for an excellent demonstration. Sometimes Hollywood does hackers a great service by giving us some inspiration!
[Thanks Itay for the tip!]














Hope we don’t have to wait until puberty to manage our centre of mass!
Or, for that matter, wait for our mid-teens until we’re even able to walk :)
Was thinking just this. Yesterday I was watching my 1 year old run around, and manage to balance even when trying to come to a sudden stop. He does it slightly differently to how I do it as an adult, he’ll actively turn his feet towards the direction of the fall and immediately start holding his arms out in case even if he doesn’t actually fall, but he’s certainly got the idea of it before his teens!!
now that’s a very “out of the box thinking” approach to solve the balancing problem. LOVE IT! Though if for some reason this ever makes it into a house-hold robot. I won’t be buying one…
didn’t the big red button (in case of emergency?) not a bit to close of the source of hazard? :-D :-D
I’m pretty sure its to protect the robot, and not the operator
neat, now one can wonder why it simply do not fly over the ditch…
.. because it doesn’t have enough lift to do so?
It also has no way of controlling its attitude while flying. This is a really clever solution, although extremely power hungry.
“… so during our adolescence we learn to shift our body weight around to maintain a stable center of balance.”
You won’t believe me, but I have seen children walking on their own!
That’s obviously a hallucination.
I prescribe a comfy chair and a nice, freshly made cup of tea. The latter to be taken internally of course :)
At least we know that this robot will never sneak up to you from behind. (unless you are one of those headphone zombies)
Had a Zombie walk across the road yesterday. I don’t know how she didn’t get killed.
Its getting really bad out there. It getting to the point I see them every other day.
And they say they don’t exist. B.S.
bicycle zombies are worse. flying through four way stops without stopping or checking flow, no lights at night while wearing dark clothes. no ppe on at all, often these are highly educated people even not some poor kid / student or druggy.
“Ducted fan jet engines”? Did they mean ducted fans?
remember when stark has gone thru the roof loll did not happen in this video loll
Can anyone tell if the fans pushing up on the moving foot to give a partial second point of ‘contact’ or down on the stationary foot to create a more stable point of contact? I could imagine advantages for both.
My interpretation of the billowing of the blue backdrop is that the foot that is crossing the gap is supported by fan thrust. It would be interesting to see what kind of added performance you could get by employing both techniques.