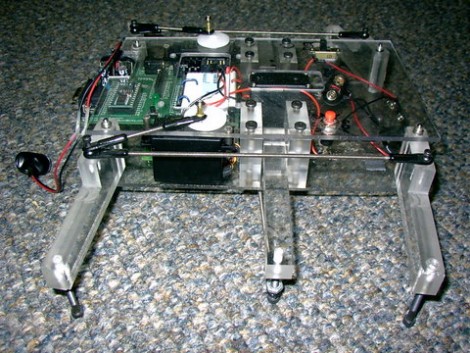
[JC] built himself a hexapod based on a project he found on the Internet. It worked fairly well, but was mechanically weak and prone to breakage. He set out to improve the design and came up with the unit seen above. It uses three servo motors to control the six legs, and walks quite well as seen in the quick clip after the break. It’s not quite as agile as the little acrobatic six-legger we saw yesterday, but the movement is quite pleasing and it’s capable of moving forward, backward, and turning. [JC’s] post is four pages in all so don’t forget to seek out his links for the construction, linkage, and servo control pages to find concept drawings, cad designs, and his thoughts on the process.
[youtube=http://www.youtube.com/watch?v=yhaSGIUmF_0&w=470]















Hey thanks for the post Mike! I think HAD is a great site, so it’s awesome to be featured.
@JC,
I saw your comment on another thread and passed it along to Mike. People should send us their projects instead of making us hunt them down!
Really nice robot, but even better write-ups. Thanks for sharing all the great info, JC!
@EFH, thanks for the feedback!
Hack-a-day needs “like/dislike” buttons. I like this.
cant v make hexapod without survos!!!
I am trying to make it only dc gear motors!!
When work is a pleasure, life is joy! When work is duty, life is slavery.