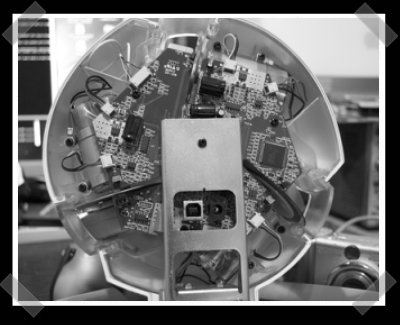
[qDot]’s been spending alot of time with the Novint Falcon haptic controller. He’s put together a ‘brain dump’ of everything he know about the device – and some notes on his efforts to put together his own software library for the thing. I’m definitely interested in the parallel robotics platform that it appears to be based on.




5 thoughts on “Reverse Engineering The Novint Falcon”
Leave a Reply to qDotCancel reply
Please be kind and respectful to help make the comments section excellent. (Comment Policy)










This is super cool as I was working on a usability study for my human-computer interaction class with the same product. I always wanted to get a second one and mess with it. Haptic controllers in general are really cool.
years of hardware hacking and moding with valve’s source engine i have never thought of this. the next step is making it more sturdy and allow more force to be ….. welll….. fed back!!! maby add in that shocky thing and other senses like hot and cold or add n something like a powerglove ( i think i have never used one) where you can movve your fingers and pick things up and put force feedback on that …. ofcorse its going to be expensive and more of a luxury than any thing else but that would be the next step in Vral
I’m not thinking about gaming when I see that gadget.
Imagine this device hooked up with motion sensors and make it react to movement and counteract it holding the ball (jerry rigged to hold a camera for instance) perfectly still.
sure, stuff like that allready exists but dang its expensive. 20.000$ easily for a small “cheap” model so when this hits the market for ~200$ its like Christmas day to any hobby DIY photographer or indie film maker.
I know for sure I am getting one of those once someone makes a HowTo on rebuilding it as a motionless camera platform.
So, I’ve gotten a couple of emails and saw the comment here about the motion handling platforms…
Sorry to burst your bubble here, but unless your camera is real, real small, and your motion adjustment is < 4", this isn't gonna do you much good. The falcon is GREAT for what it was made for, which is supporting the human hand. Trying to carry the full weight of a camera isn't something the motors will do happily, if at all. Also, you only get translational axes (with the default grip, at least. I supposed you could build a new servo based one...), no rotational. All this being said, I might still give the project a shot with a wiimote and a webcam or something, just to say I did it. Sounds fun. :)
Don’t forget you can buy more than one =)
Especially if theyre 99$