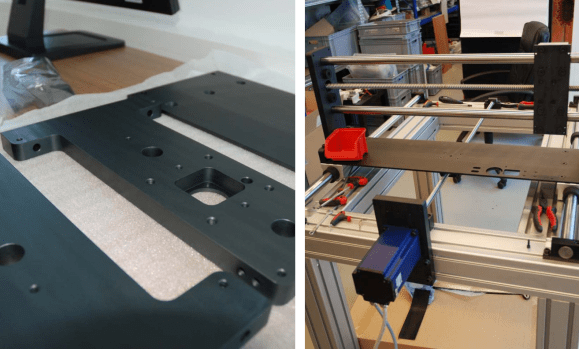
It’s not totally fair to say that this project is just getting under way. But the truth is it neither picks nor places so there’s a long road still to travel. But we’re impressed with the demonstrations of what [Daniel Amesberger] has achieved thus far. Using the simplest of CNC mills he’s finished the frame and gantry for the device. You can see some of the parts on the left after going though an anodizing process that leaves them with that slick black finish.
The demo video shows off the device by driving it with a joystick. It’s fast, which gives us hope that this will rival some of the low-end commercial pick and place machines. He’s already been working on the software, which runs on a mini ITX form factor computer. This includes a gerber file interpreter and some computer vision for a visual check on part placement. He hasn’t gotten around to building the parts feeders but we’ll keep you updated as we hear back from him.














Impressive, not a toy.
And if he does not pick or place, it can always 3d print
Crazy motors! Is this thing going to mill and drill between pick-and-place jobs, or is it going to pick and place elephants?
It’s gonna pick&place pick&place machines
A pick&place to pick&place pick&place-machines? Sounds like a job for…
http://www.meme-generator.de/meme/3pmkwh
Give this man a gold-plated spanner!
on a more serious note, pick and place machines are usually scarly fast see:
[youtube=http://www.youtube.com/watch?v=nah4BQ9y8IY&w=420&h=315]
and what you can’t see on that video is the 200 feeders slamming back and forth at the rear of the machine to feed the turret
Now that’s an impressive machine.
But this performance is necessitated by the tendency of designers to design more and more components onto boards. So for production purposes you need that kind of performance. But for hobby or small-series work, one component every two seconds still means 1800 components per hour, or more than you’d be able to do by hand.
That has to be like 300 IPM there.
He says his steppers achieve 1800 RPM and he uses 20m pitch spindles. That would come to 1417 IPM if my calculations are right. For metric guys: 600mm/sec.
Does anyone know what kind of actuator he use to pick up and rotate the components? I’ve seen that many people just use two nema 17 steppers to do the job, but that does get very heavy indeed. And where does one buy the nozzles?
I bought a manual picup-and-place pen from a cheap chinese store. They probably all have it now. Use your own favorite. Anyway the pen came with a bunch of rubber sucktion sockets to grab the components with.
I’ll be working on the pickup and rotate mechanism of my own machine the rest of the day. :-) Two 9g servos are planned…… Much lighter indeed than nema17 steppers.
looks a bit like nema8 possibly drilled through the shaft, several hits on “pick and place nozzle” on ebay
I use Nema 11 steppers with a hollow shaft for rotation, and Nema 17 BLDC servos for the Z axis.
Madell make some nozzle holders and sell the Fuji CP-6 nozzles. Although you can buy them cheaper from Curt at count on tools. They run about $10-$25 depending on the size and style of nozzle. We are looking at building up some cp-6 holders so we may release some drawings and notes when they are made.
Awesome! More of this sort of thing.