 Okay, so he doesn’t have Grandma riding in it that we know of, but [zim] recently decided to turn a Jazzy mobility chair into “a radio-controlled platform for mischief”. RC offers more range than wifi or bluetooth, and he was able to find a reasonably priced secondhand radio on Craigslist. However, he found out that in the event of signal loss, the receiver keeps sending the last commands to the speed controller. [zim] didn’t want his 150 lb (68kg) mischief platform getting loose, so he devised a fail-safe that cuts power to the motor when the signal is lost.
Okay, so he doesn’t have Grandma riding in it that we know of, but [zim] recently decided to turn a Jazzy mobility chair into “a radio-controlled platform for mischief”. RC offers more range than wifi or bluetooth, and he was able to find a reasonably priced secondhand radio on Craigslist. However, he found out that in the event of signal loss, the receiver keeps sending the last commands to the speed controller. [zim] didn’t want his 150 lb (68kg) mischief platform getting loose, so he devised a fail-safe that cuts power to the motor when the signal is lost.
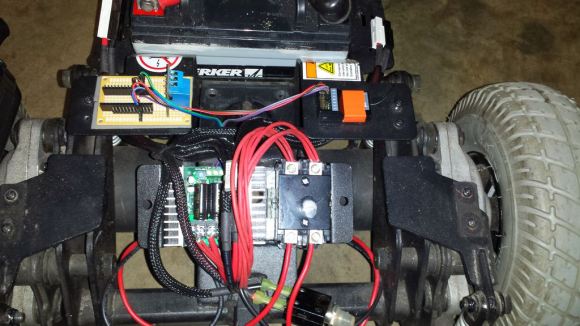
[zim] discovered that the receiver returns channel 3 (the throttle) to a preset condition whenever the signal is lost. He used a 24V HVAC relay controlled by an Arduino Nano to sample the PW on channel 3 and shut it off when either the throttle or the signal are cut.
If Grandma is feisty, you could build this caged-in version with a shopping cart.













what a terrible writeup. Doesn’t even make sense anymore !
Here’s what thy guy wrote :
“Further reading informed me that the receiver would return channel 3, typically used for the throttle, to a preset position when signal was lost. Great! All I need now is a relay that triggers at a certain servo position. I could even do that with a little switch, which when pressed by the servo, could let go of a relay, disconnecting the motors. Except that would be ugly.”
The reason the throttle returns to a certain preset, had zim bothered to look, is because he’s using an aircraft R/C radio:
http://www.tacticrc.com/transmitters/tacj2600-ttx600/index.html
…to control a land-based vehicle.
Given that he lives in Florida – he has to abide by United States frequency rules; now, this transmitter and receiver seems to be a 2.4 GHz SS system – had he been using an FM system for aircraft (at 72 MHz) – that would have been a big no-no (surface craft need to be on 75 MHz):
http://www.fai.org/ciam-our-sport/frequencies
It isn’t really clear whether there are any restrictions from the FCC to using a 2.4 GHz SS aircraft radio to control a ground vehicle, or vice-versa; in theory, it shouldn’t matter (given the way the system works – there shouldn’t be signal “collisions”) – but until there is a clear-cut ruling (which may or may not happen), one should be wary about using an aircraft transmitter to control something other than an aircraft. It may not matter what the technology is – the FCC could just decide to make it illegal to use these transmitters in this manner, because of the earlier precedent.
There’s also the issue of what zim has run into – the throttle is set in this manner so that the aircraft it is controlling will continue to fly (instead of crashing to the ground uncontrollably) in the event of a signal loss; the rules could be changed (or updated) in such a matter as to make it illegal to use such settings for a land-based craft – ignoring the frequency issue altogether.
In short – for 2.4 GHz RC in the US – the legal waters are kinda grey right now (if manufacturers were smart, they would dump the “aircraft” vs. “land” vehicle designations from their 2.4 GHz RC control systems entirely).
The 2.4 GHz band is unregulated worldwide. Therefore, the FCC (or whatever the government body equivalent for zim is) has no control over whether or not people use hardware in that spectrum for controlling what it was intended to control. http://en.wikipedia.org/wiki/ISM_band
Actually you have it just the opposite. Channel 3 is the throttle channel traditionally on aircraft (Channel 3 used since it was “cushioned” from interference by the other channels on old analog sets). In other words, in a situation where you lose signal it would cut all power and glide with the last servo settings (all the other channels)
However, this “hack” really isn’t much of hack at all, since he’s just doing the same exact thing that the receiver is designed to do. (Shutting down channel 3 IS the receiver’s failsafe.)
Everybody’s a critic :) Yes, there’s a hundred other ways to do this. Some better, some worse. I chose this way to use the materials I had on hand. Period. If you can do it better, I’m happy for you… but I’m not doing it any different unless you want to fund the equipment. Here are a few comments in no particular order…
@bthy – sorry you didn’t like my conversational style. Who the fuck are you again?
@crosh – I used an aircraft radio because it’s what I had on hand and I hate the little steering wheel controllers used for cars. As mentioned, it’s all moot with 2.4GHz spread spectrum anyway. The FCC could care less what I’m controlling on those frequencies as long as I’m not interfering with other users.
@Bryan I did not use channel 3 as the throttle because its joystick was not spring loaded to return to the center position and I wanted to use the same stick for fwd/rev/left/right. It may not be much of a hack, but then I posted it on Instructables, not Hack A Day. It also meets my requirements of disconnecting the drive power when my receiver’s failsafe is triggered by using the technology I had on hand.
@Rodger There are no inclines in Florida so the unit rolls to a stop in about a foot of level ground. Eventually, the relay will be removed and the drive channels will be ‘passed through’ the Arduino so an actual ‘stop’ signal can be sent.
@everyone else… Where were you when I needed you?
The goal here was safety. It would seem that that goal was only semi-realized because disconnecting power to the “lead sled” on an incline does not stop the vehicle. The current in the motor should be recirculated (plug braking) to stop the motor. This could be done by shorting the motor after power was severed. Alternatively a locked-antiphase controller would only need a zero command.
I can’t speak on this particular model, but when I tore down a mobility scooter, the motors had physical brakes on the motors that needed power to disengage. Cut power, and it stops reliably. I suspect this is a standard failsafe on these scooters.
The sabertoth is capable of doing this w/o the need of external software.
Hmm. Looks like he could have just set the receiver to return a throttle value of zero on failsafe: http://www.robotmarketplace.com/products/0-TACL0624.html
Yes, it can return a throttle value of zero ON CHANNEL 3…. except I’m using 1 & 2 for control since I prefer a spring loaded joystick.
this whole thing cracks me up… almost all digital receivers have built in failsafe… just bind the receiver to the radio with the desired channels in the desired positions .. and if it doesn’t rc failsafes have been around a LONG TIME and are very cheep.. probably can pick up a brand new one for $15 far cheaper and less bs than using an Arduino lol ..
When it comes to safety-type systems, sometimes an OTS solution is best for reliability.
Arduinos on hand: 3
RC Failsafes on hand: 0
Glad I could amuse you.
3ch car recievers have usually failsafe. 6ch and 8ch are designed for planes an there is no failsafe. I this case i would propably use 2 recievers if i needed more than 3ch. 3ch reciever for driving and second reciever for aditional functions.
One of my early experiences in building ROVs was a vehicle that went headlong into a tree and flipped over right on top of the very expensive video transmitter I was borrowing when the video transmitter de-sensed the RC receiver .(harmonics and an ancient AM RC system were to blame) I still have that run on a VHS tape somewhere, very funny now. THEN, not so much. :|
After that I upgraded my RC system to FM and built an OTS RC cutoff system into my ROV to make it a little more “First Law” safe for when it went out of control range or it encountered interference.
I wish I had one of these platforms to work with back when I was into this stuff! They are awesome.
Compared to my home built, the powered chair platforms have better speed, better range and are designed specifically to carry dead weight equal to a mess of awesome systems to be tacked-on later over flat or uneven surfaces.
Stick a camera (or cameras) on that bastard and start feeling the tension that IS being an ROV operator!
Enjoy your experiences my friend! :)
The FPV transmitter/receiver should be here tomorrow!
Do you really ever want to kill power to the scooter? What if you leave someone in the middle of road? This doesn’t seem like a good idea.
Yes. I want to kill the power when the unit has ran beyond control range and is still traveling at full speed. As for leaving someone in the middle of the road, this does not carry passengers and I know better than to play with my toys in the street.
At first read of the title, I thought perhaps someone had put something like one of those “invisible fence” shock collars for dogs on their grandma. Glad that wasn’t the case, but still an amusing mental image.
Oma, I have a new goth dog collar for you to wear to your Rammstein concert.
I’m not sure what’s more entertaining here, the comments, or the general defensiveness of [zim]. It’s like he’s never read hackaday before. Srsly dude? Chill.
I’m defensive by nature but I can live with it. Blame it on insecurity, I guess. I don’t read hackaday, either. I’m not sure to how to chill, but I can draw a pony.
Mark – I don’t see any comments saying, “Thanks for taking the time to document your project and sharing it with others” … so I’ll say it here. Your post plus all the comments DO help a lot of us who are still learning. Much appreciated.
You’re welcome! I usually learn more from the comments than I do from most tutorials, including my own :)
jazzy power bases come with a few different controllers/joysticks depending on the model… in my experience as a medical equipment/power mobility repair tech, every power chair or scooter i’ve ever seen comes with physical motor brakes that are not dependent on the control units. when the power is off the brake is engaged, unless the “neutral” lever is flipped, but you have to actually do that by hand.
i would like to grab one of those sparkfun controller boards and wire up the dead machine i have in the basement at work. load carrying capacity on those things is about 300-350 lbs on average, with approximately 15-20 miles on a full charge. 24v systems with agm or gel batteries and SOME models can be mildly customized with high torque OR high speed motors…
power chairs and scooters both use gearboxes or transaxles, so you will have to work with that, but as far as a good, quick place to start you can find “dead” units in the classifieds or yard sales pretty cheap, or free. who wouldn’t want a 150lb semi-autonomous vehicle that can carry 300 lbs on average terrain? with the right mods they can be made to go off road and are generally very sturdy… some even have articulated suspension that could be played with, too. FUN!
One of the first things I did was to remove the brakes. They required power to keep them ‘open’ much like air-brakes actually require pressure for the wheels to turn. Had I left the brakes on the motors, something similar to this circuit would still be required to engage them when signal was lost. It would also have to cut the motors so they did not overpower the brakes. This was all handled by the OEM controller, but with great restriction on speed, acceleration and input methods.
I don’t see that SparkFun offers a controller rated at more than 15 amps, so you might want to look at offerings like those of Dimension Engineering. I’m using the Sabertooth (http://www.dimensionengineering.com/products/sabertooth2x25) dual 25 amp controller which employs regenerative braking and offers a number of input schemes.
Right on about the used power chairs. I paid $150 for this one and sold the OEM controller/joystick for $100 and ended up with a carrying capacity of 300lbs at 5MPH for 15 miles for $50.