Taking on an autonomous vehicle challenge, [Randy] put together this drone which can locate and pop balloons. It’s been assembled for this year’s Sparkfun Autonomous Vehicle Competition, which will challenge entrants to locate and pop 99 luftbaloons red balloons without human intervention.
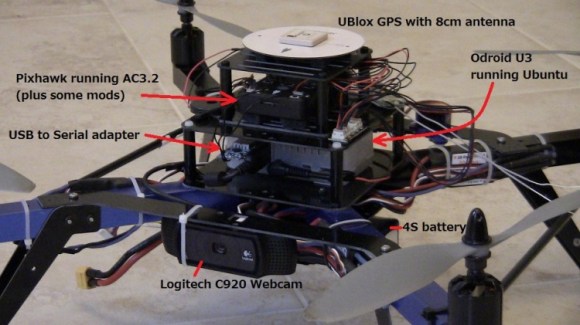
The main controller for this robot is the Pixhawk, which runs a modified version of the ArduCopter firmware. These modifications enable the Pixhawk to receive commands from an Odroid U3 computer module. The Odroid uses a webcam to take images, and then processes them using OpenCV. It tries to locate large red objects and fly towards them.
The vision processing and control code on the Odroid was developed using MAVProxy and Drone API. This allows for all the custom code to be developed using Python.
The Sparkfun AVC takes place tomorrow — June 21st in Boulder, Colorado. You can still register to spectate for free. We’re hoping [Randy]’s drone is up to the task, and based on the video after the break, it should be able to complete this challenge.














lol- let’s hope it doesn’t come up behind someone wearing a ski mask one day..
Slowly working towards the “seeker” on Dune! nice work!
Neat – Happy Hunting tomorrow.
Great, now just add a laser balloon popper, and maybe even a pixy (cmucam5) for easier aiming.. And go crash some weddings!
great… now use face tracking instead of color tracking and use steel blades as props.. scary as sh##!
should add a green lazer to do the popping :)
Hi if I don’t have optical flow sensor and GPS, can i still navigate my drone using velocity controller? I am using AC 3.2.1