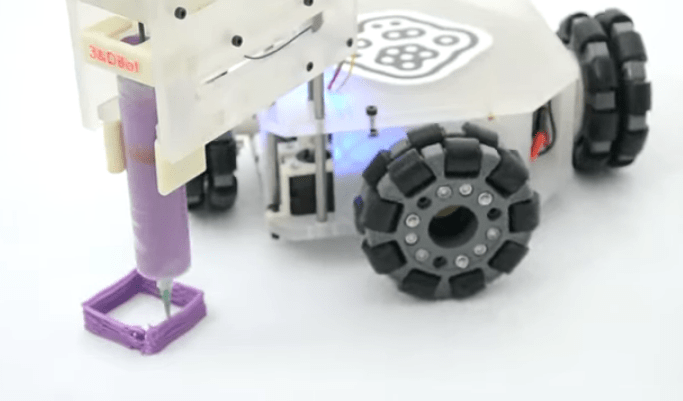
The limitation of 3D Printer build volume is over. The folks over at NEXT and LIFE Labs have created a prototype robot with a 3D print head attached to it. Unlike a traditional 3D Printer that moves the print head around within the confines of a machine, the 3&DBot drives the print head around any flat surface, extruding as it goes.
Although the 3&DBot has 4 wheels, they are all stationary and face independent directions. Normally, this arrangement would only allow a vehicle to rotate in a circle. However, the wheels used here are not conventional, they are Mecanum-style with many mini-wheels around the main. This arrangement allows omnidirectional movement of the robot, depending on how each wheel is driven. If you haven’t seen this type of movement before, it is definitely worth watching the video after the break.
Sure, the print quality leaves something to be desired and the distance the print head is from the robot chassis may be a bit limiting but all new technology has to start somewhere. This is a great joining of two technologies. Don’t scoff, remember your Iphone 12 wouldn’t be possible without this.














Oh great, Minecraft comes to the real world.
Next up will be robots that come along and arbitrarily move the boxes the first robot printed. Stupid enderbots >,<
Correction: these are omniwheels/rotacasters, not Mecanum wheels. http://en.wikipedia.org/wiki/Mecanum_wheel
At this point, though, I suppose the machine is limited only in the height factor for prints?
Yep, BIG difference between Mecanum and Omni Wheels, and these are clearly omni.
And as far as I can tell, this still leaves huge limits on what it could 3d print – sure you could make an infinitely long object, but with the nozzle extended only a few inches out from the drivebase, you couldn’t make anything large that isn’t just a perimeter. And although its a neat project and utilization of holonomic drive, positioning error over any significant distance is going to be a huge problem.
You could potentially do large objects that are not just perimeters, but you would have to build your print sideways instead of up. If that makes sense.
Or inside out.
Omni wheels in an X-drive layout. most of the same benefits as a Mecanum drive though,
These are basically omniwheels used as meccanum wheels with the angle of the driving axles standing in for the angles of the freewheels on true meccanum wheels. I would not have thought it would work, but there it is! Gotta file that tidbit away for later…
The limitation of 3D Printer build volume is over at the same time as the hyperbole level reaches a new high.
so this was my idea realized, ahh budget… Well since someone else made it, I might as well contribute. How about we change the driving surface to have printed fiducial marks (stickers?) so that the robot can compensate and produce prints with standard quality? Shouldn’t be too hard to implement ala pick and place vision…
If you’ll notice carefully, in the still above the article, there is one, big, fat fiducial on the back of the robot. Same idea, just implemented the other way around.
Awesome!
So, now we have to housebreak our printers?
Honey, the 3d printer is pooping these little boxes all over the house! Ummmm, they’re made of frosting! Ewww, it’s printer poop!
But the printer pet will be all the rage with the kids, makes picking up after it fun. :)
This is fantastic! I’ve been hoping someone would put this together for years. There was that CNC mill attached to a hexapod a few years ago that I thought would morph into a 3D printing hexapod — maybe that would offer a bit more stability than the omniwheels?
did we forget about this
http://hackaday.com/2013/12/30/geoweaver-rise-of-the-monster-3d-printing-hexapods/
Made in Brazil o/
Someone should make a version that is a blimp or hover craft, so the robot can travel over what it prints without damaging it.
But that would take more energy, be more difficult to track position.
Consider an arm instead? More overall cost (offset by normal wheels and steering system) but more agility without much extra energy.
an extendable arm would help it reach over things, but large finely detailed parts would still be difficult if not impossible.
Put a quality 3-d printer on the back of the robot to print out the detailed bits, and then use a robot arm to hold the bits in place as the big printer builds around them.
For real challenge; A hose that sprays out 3d printed material using a parabolic curve calculated from gravity and the force of projection from the nose.
Oh, and correcting for wind and air turbulence ;)
“It offered 30 minutes of talk time and 8 hours of standby”
“It was priced at $3,995”
“was 10 inches (25 cm) high”
Sounds about like what we can expect from the 12th crappy, overpriced phone from Apple.
And it still won’t be waterproof.
Something must’ve really scared it to make it shit bricks!
The repeatability is clearly an issue in a system like this, as wheels are not perfect and will slide enough to create a sustained drift. However, it is quite a cool experiment and perhaps sensors could be added somehow to provide a certain position feedback to corrent for the drifting, who knows. In any case it is a nice experiment with remarkable results.
Put fondant in the print head and it can make gingerbread houses. Get another robot to hold the pieces of gingerbread in place.
Or make a giant size version to build houses. Print the rebar in hard plastic, and the structure in concrete. With gps and driverless cars you can build a whole city with zero humans involved.
I remember an old animated video about a futuristic vehicle (as defined in the ’60s) that would print a bridge while it was rolling on it. I think we’re getting closer to it now.
I have some friends in Vermont that would have greatly appreciated that kind of technology when the flooding wiped out the bridges.
Why is the video repeated between 1:17 and 1:27? It gives the strong impression that the system is not able to repeat the proces of building a layer at that height or they forgot to film it…
This does not allow “virtually unlimited” print volumes.
Technically the X/Y print dimension are limited to 2x the length of the distance from the printhead to the nearest protruding section of the robot.
In this case that looks to be about 5cm for a 10cm X/Y print limitation.
Extending the boom to fix that only creates more instability and reduces accuracy.
Oh ye of little imagination! This little rascal can print platforms and ramps!
there seems to be a lot of noise in the prints. i bet this noise is amplified by the size of the object it is printing.
It’s like trying to print wearing ice scates.
I somewhat don’t see the point in this. Might be interesing for nasa to put on a mars probe to sinter buildings from mars dust using a big CO2 laser, but here on earth with all tools available, I rather use a CNC mill
i hte to say it but this has been done before someone made a spider looking device that printed in PLA.
http://www.youtube.com/watch?feature=player_embedded&v=FHnaLbghZ1o
also this could be modifyed
http://www.youtube.com/watch?v=quN37YskoaM
The bot is NOT limited in height. It can drive over the layer it already printed!
Indeed. And just like we have support material, prints would autocratically make the required “drive up to print ramps”.
Messy, probably a bad idea….but fun!