One of the greatest uses we’ve seen for 3D printing is prosthetics; even today, a professionally made prosthetic would cost thousands and thousands of dollars. For his entry to the Hackaday Prize, [Martin] is building a low-cost 3D printed hand that works just like a natural hand, but with motors instead of muscles and tendons.
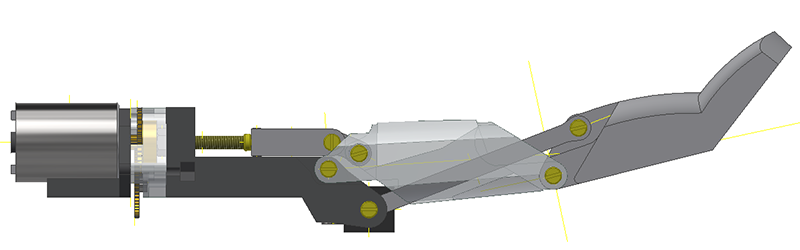
There are a lot of 3D printed finger mechanisms around that use string and wires to move a finger around. This has its advantages: it’s extremely similar to the arrangement of tendons in a normal hand, but [Martin] wanted to see if there was a better way. He’s using a four-bar linkage instead of strings, and is driving each finger with a threaded rod and servo motor. It’s relatively strong; just the motor and drive screw system was able to lift 1kg, and this mechanical arrangement has the added bonus of using the servo’s potentiometer to provide feedback of the position of the finger to the drive electronics.
This is far from the only prosthetic hand project in the running for The Hackaday Prize. [OpenBionics] is working on a very novel mechanism to emulate the function of the human hand in their project, and [Amadon Faul] is going all out and casting metacarpals and phalanges out of aluminum in his NeoLimb project. They’re all amazing projects, and they’re all making great use of 3D printing technology, and by no means are there too many prosthetic projects entered in The Hackaday Prize.














This got me thinking of Bill’s finger project. How is it going along?
http://hackaday.com/2014/08/27/bils-quest-for-a-lost-finger-episode-i/
The reason why they don’t usually make them this way is because the mechanism needs to be back-driveable and compliant. Otherwise it will break in use from excessive stress.
The linkage system is fine, but the leadscrew is going to jam and the gears will chip. If you could get two rotating output shafts, you could employ a twisted string actuator that acts more or less like a real muscle pair that has some elasticity in it.
I remember a few years ago reading about piezoelectric plastics. Wonder if they could be used to create robot actuators. They don’t have to be that strong. Animal muscle cells are individually weak, but combined, they can exert hundreds of pounds of force. Maybe you could print them on a sheet, and then roll it up, or something.
Piezoelectricity usually involves thousands of volts to make any sort of significant movement, so the issue is probably not in how to make them, but how to drive them.
I think you’re thinking of barbecue lighters that emit high-voltage sparks, but that’s actually the reverse process. Piezoelectric speakers, for example, operate at 3-5 v. They already use piezoelectric actuators on the Mars rover (not sure which). This vendor sells linear actuators that operate within a reasonable range:
http://www.pi-usa.us/products/PiezoActuators/
I’ve used an assortment of piezoelectric actuators from PI over the years, and squiggle motors from New Scale. They are relatively low voltage, but most of them are slow, and really only useful for fine positioning. Although they have models that can do 150mm/second linear travel.
Those piezoelectric motors work by a sort of harmonic motion, like the many legs of a centipede walking along a rod to push it.Those sort of motors don’t really solve the issue here because it still has a tiny mechanism that breaks and jams when you bump it into something hard.
Thanks for the comment. I’m aware that the leadscrews can be an issue. A really wanted to go with a cable-driven system, that would be naturally more compliant. However, using this non-reversible mechanism was the only way I found to get batteries to last at least a day (not having to constantly drive the motors while grasping something), and to fit the whole mechanisms + electronics in the palm of the hand. To avoid demage caused by motor stalling, I’m plannig to monitor the current on each motor.
I’m still looking for improvements to make, so thanks for the tip!
You can do away with back-driveability if you put a friction clutch in the system to protect the gear train, but you will still have a problem with the leadscrew because the moment you bump the fingers into something, you’re going to put a notch in the thread – especially as thin as M3 – and then it’s going to stick.
The motor probably isn’t going to be strong enough to damage itself or the gears when it stalls. It’s just a matter of not getting it too hot.
The main problem is sudden impacts and shocks on the mechanism. The hinges and joints will manage, but the threads and gears won’t. Another protection mechanism I just thought about is to connect the leadscrew with the gearbox using something elastic that buckles at a certain amount of torque – like a piece of silicone tubing.
I have a brother with Lupus, the worst thing about it for him (partly due to the meds used) is that his joints are all disappearing. His hands don’t really look like hands anymore. His muscles are strong, but there’s little cartilage left. What he really needs is an exoskeleton to provide his muscles some guidance and leverage. Some type of power-assist would be nice, but it’s not critical. There are lots of people like him. Does anyone know of a project for this type of problem?
Contact me through hackaday.io or start a project yourself, learning CAD and 3d printing is easy.