[Ray Kampmeier] just finished writing some code to allow him to control his robotic arm using force-sensitive hand gestures! He calls it the Robo Marionette.
He’s using a MeArm 4 DOF robotic arm, a Sensel touch interface, an Arduino Uno, and a servo shield for the Arduino to control the MeArm. All the code you need is available on his GitHub, but unfortunately the Sensel touch interface isn’t actually available to the public yet.
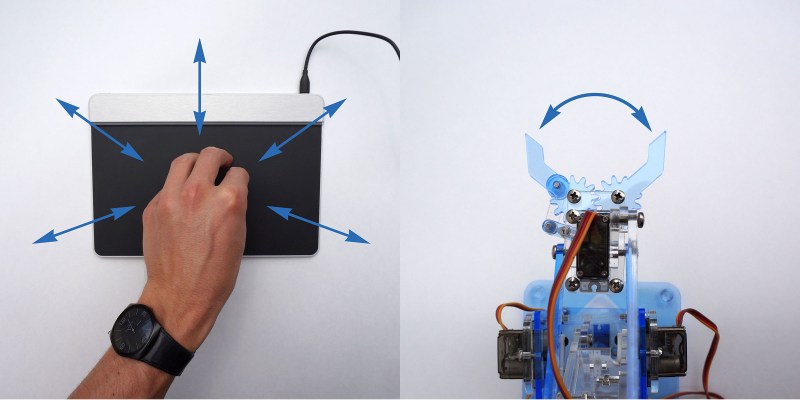
Regardless, it’s a very cool proof of concept of what you can do with a gesture interface device like the Sensel. The MeArm ships without a controller and pairing it with a non-traditional control method (joystick, knobs, hardcoding, etc.) really takes the two devices to a new level they wouldn’t reach by themselves. See for yourself in the video below. MeArm is available in the Hackaday Store.
Other gesture controlled robots of note include using two Leap motion controllers to control some industrial robot arms — for robotic surgery! And of course there’s also advanced robotic arm control using a Kinect!














Sensel actually launched a Kickstarter a couple weeks ago if anyone’s interested: https://www.kickstarter.com/projects/1152958674/the-sensel-morph-interaction-evolved