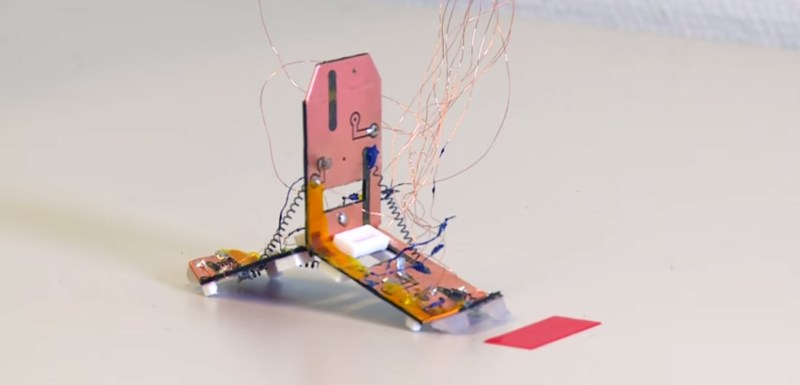
This is some seriously cool research. Scientists at the EPFL (Ecole Polytechnique Federale de Lausanne) have made tiny, tiny, tiny robots using shape memory alloys, or SMA’s for short. They weigh less than 4 grams and move like an inchworm!
Unlike regular robots that feature rigid structures and electric actuators, the researchers opted to take more of an origami like approach — so much so, they call it robogami. Their very first attempt was years ago, and was rather large. Since then they’ve shrunk it down to about the size of a compact flash card. The way it works is quite simple. SMA’s shrink when heated (either externally heated or by an internal current) and in doing so, produce extremely high forces.
So by patterning these in a shape (like that of an inchworm) the researchers are able to trigger each “limb” separately to induce movement. They can also jump seven times their height thanks to the super high power-density of SMA’s.
SMA’s are available to the public, but sadly we haven’t seen many hacks that make use of them.
[Thanks Steve!]














SMAs are available to the industry also, and there do not find wide spread use yet either.
The best use I saw so far was in an rc model car in scale 1:160, used to steer the vehicle. A similarly small one:
https://www.youtube.com/watch?v=NXr1-L8GXoQ
Watch him pick it up at 0:27, in case you mistake the match for a 3.5 inch version :-)
I think the real-life uses are in miniaturised devices that need to move, but do not need to watch energy consumption that badly. If I wanted to make something that moved, I would use motors and servos, and get more movement per watt I think.
im totally surprised they are not being used in r/c vehicles more. control surfaces for tiny aircraft for example. ive been wanting to experiment with that for some time now. connect it to the outside of the wing so airflow over it provides the cooling, perhaps with a strip of foil tape acting as a heat sink. drive current over the wire through a transistor with some pwm. curious to see what kind of actuator speed and stability i get. probibly just stick a couple elevons on a paper airplane and see if i can control pitch and roll.
Shape memory wire servos have been commercially available for a few years now (at least since 2007, see: http://www.lecun.org/blog/index.php?entry=entry071108-162605).
Custom designs such as the video above have been around longer than that. I still have a copy of the Stiquito book (https://en.wikipedia.org/wiki/Stiquito), which contains a length of Nitinol muscle wire. That book came out in 1992.
Considering this, I have to agree that it seems underutilized. But it’s not that it’s really cutting edge anymore, but it seems we still haven’t found a real use for it. So far, it seems other technologies always win. Just look how far normal servos have come since 1992.
I think they would require too much current to make sense for lightweight battery powered applications.
I made exoskeleton legs with sma’s. Don’t recommend people do the same thing due to heat dissipation problems. But for small robots sma’s are great!
I am so disappointed. I thought they had built a robot with the density of air.
Well if you go by that definition, the dirigible UAVs did that a while back.
so now I know where the research budget is going… down the toilet
But but but there is a new paradigm!
EPFL is doing some amazing work. And the book “Bio-inspired artificial intelligence” by Floreano and Mattiussi is the best one on practical AI I have found so far.