
Hackers, makers, and engineers have been hacking on robot projects since the era of clockwork mechanics. Any robot is a cool project, but there is something particularly attractive about small ones. Maybe it’s the skill required to assemble them, or perhaps it’s the low-cost. Either way, there are lots of palm-sized robot projects on Hackaday.io. This week on the Hacklet, we’re going to highlight a few of them!
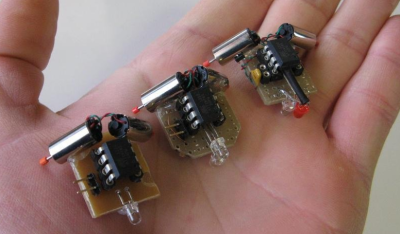 We start with the granddaddy of them all, [shlonkin] and Tiny robot family. [Shlonkin] built line following robots that can hide under a US half-dollar coin. The robots are simple circuits – an ATtiny85 with an LED and pair of phototransistors. The code is provided both in Arduino’s wiring, and in straight C++. Two coreless motors, normally used in cell phones vibrators or quadcopters, provide the locomotion. These robots only know one thing – moving forward and following a line. They do it well though! We love this project so much that we hosted a tiny robot workshop at the 10th anniversary back in 2014.
We start with the granddaddy of them all, [shlonkin] and Tiny robot family. [Shlonkin] built line following robots that can hide under a US half-dollar coin. The robots are simple circuits – an ATtiny85 with an LED and pair of phototransistors. The code is provided both in Arduino’s wiring, and in straight C++. Two coreless motors, normally used in cell phones vibrators or quadcopters, provide the locomotion. These robots only know one thing – moving forward and following a line. They do it well though! We love this project so much that we hosted a tiny robot workshop at the 10th anniversary back in 2014.
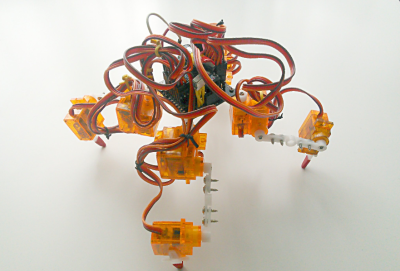 When it comes to tiny walking robots, [Radomir Dopieralski] is the king. Many of his projects are small biped, quadruped, or even hexapod robots. He’s done things with 9 gram nano servos that we thought were impossible. Tote, an affordable spider robot, is his latest creation. Tote is a four-legged bot utilizing 12 9 gram servos. [Radomir] created a custom PCB for Tote, which acts as a carrier for its Arduino Pro Mini Brain. This robot is easily expandable – [Radomir] has experimented with the Teensy 3 series as well. Controlling the robot can be anything from an ESP8266 to an infrared remote control.
When it comes to tiny walking robots, [Radomir Dopieralski] is the king. Many of his projects are small biped, quadruped, or even hexapod robots. He’s done things with 9 gram nano servos that we thought were impossible. Tote, an affordable spider robot, is his latest creation. Tote is a four-legged bot utilizing 12 9 gram servos. [Radomir] created a custom PCB for Tote, which acts as a carrier for its Arduino Pro Mini Brain. This robot is easily expandable – [Radomir] has experimented with the Teensy 3 series as well. Controlling the robot can be anything from an ESP8266 to an infrared remote control.
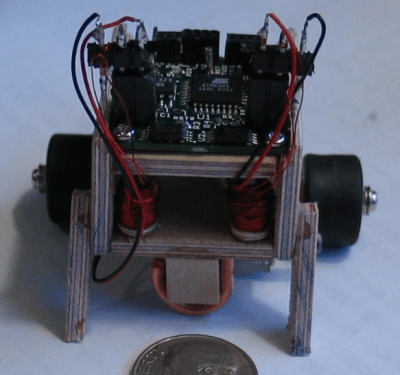 [Alan Kilian] may well have the ultimate tease project with Hand-wound inductors for a tiny robot. [Alan] was using some tiny GM-10 motors on his micro-bot. The motors didn’t have inductance for the locked-antiphase drive controller. His solution was to wind some coils to provide a bit of added inductance. The mod worked, current consumption dropped from 116 ma to about 6 ma. We want to know more about that ‘bot though! It’s controlled by a Megabitty, [Monty Goodson’s] ATmega8 controller board from sometime around 2003. The lilliputian board has been very popular with the nano sumo crowd. Other than the controller, motors, and the plywood frame, [Alan] has left us guessing about his robot. If you see him, tell [Alan] to give us more info on his micro robot’s design and construction!
[Alan Kilian] may well have the ultimate tease project with Hand-wound inductors for a tiny robot. [Alan] was using some tiny GM-10 motors on his micro-bot. The motors didn’t have inductance for the locked-antiphase drive controller. His solution was to wind some coils to provide a bit of added inductance. The mod worked, current consumption dropped from 116 ma to about 6 ma. We want to know more about that ‘bot though! It’s controlled by a Megabitty, [Monty Goodson’s] ATmega8 controller board from sometime around 2003. The lilliputian board has been very popular with the nano sumo crowd. Other than the controller, motors, and the plywood frame, [Alan] has left us guessing about his robot. If you see him, tell [Alan] to give us more info on his micro robot’s design and construction!
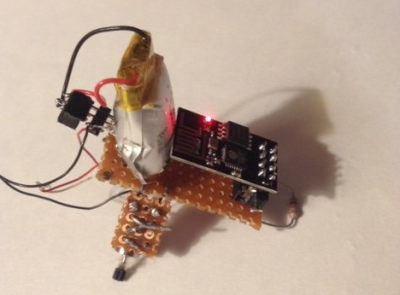 [Ccates] jumped on the tiny robot bandwagon with Tiny wi-fi robot. Rather than go with an Arduino for control, [Ccates] grabbed the popular ESP-8266 WiFi module. The construction of the bot is inspired by [shlonkin’s] tiny robot family up above. This bot is controlled by the Xtensa processor embedded in the ESP-8266. Since it only drives forward, it only takes two GPIO pins to control the transistors driving the motors. Even the diminutive ESP-01 module has enough I/O for that. We’d love see some sensors and a full H-bridge on this micro beastie!
[Ccates] jumped on the tiny robot bandwagon with Tiny wi-fi robot. Rather than go with an Arduino for control, [Ccates] grabbed the popular ESP-8266 WiFi module. The construction of the bot is inspired by [shlonkin’s] tiny robot family up above. This bot is controlled by the Xtensa processor embedded in the ESP-8266. Since it only drives forward, it only takes two GPIO pins to control the transistors driving the motors. Even the diminutive ESP-01 module has enough I/O for that. We’d love see some sensors and a full H-bridge on this micro beastie!
If you want to see more palm-sized robot projects, check out our new tiny robot projects list! These ‘bots are small, so I may have missed yours. If that’s the case, don’t be shy, just drop me a message on Hackaday.io. That’s it for this week’s Hacklet. As always, see you next week. Same hack time, same hack channel, bringing you the best of Hackaday.io!














I’m not entirely sure, but that LIPO lookes puffed to me.
um… that LiPo looks like the fuckin’ stay puft marshmallow man
I should have mentioned it in the article – but [Astearon] brought the puffy LiPo situation to [ccates’] attention 4 months ago in the project comments. I’m hoping he replaced it since then.
That LiPo has no bussiness being used in a project! Please get that far away from anything flammable!
I hope whoever is using that doesn’t just keep charging/discharging it as thats ready to pop.
I like puffy Nip… err LiPos
Wow – a microrobot with a flaming lipo. Just add a burning laser and give them wings !
this is one of the best I’ve ever seen, from 2009 :)
http://www.hizook.com/blog/2009/11/08/open-hardware-micro-robot-swarm-project
The OpenRoACH robot (~20cm) is open source, made out of 50 cents of cardboard and tent fabric and a $9 motor and transmission unit:
http://i.imgur.com/KilGI1h.jpg
https://github.com/dhaldane/OpenRoACH
Although, it is a little underdeveloped right now, despite the excellent initial design work by a number of undergrads.
That is shown with a full ODROID + mbed board stack on it, way overkill for what most people want. But it
It *really* needs a low cost, easy to build alternative, something that is 1 or 2 board that are already physical compatible (“shield” form factor or similar), and can do 2x motor drive + wireless (BTLE would be ideal).
The OctoRoACH robot (~13cm) is also technically open source, but all the details are so scattered around now that it is several years out of date.
https://alliance.seas.upenn.edu/~mastwiki/wiki/index.php?n=Main.OctoRoachCrawler?action=download&upname=MAST%20OctoRoach_Image3.jpeg
https://alliance.seas.upenn.edu/~mastwiki/wiki/index.php?n=Main.OctoRoachCrawler?action=download&upname=MAST%20OctoRoach_Image1.jpeg
I’ll clean up that project if I ever graduate, in maybe another 10 years :'( . I also have an idea of how to do the fab process using 3D printed parts instead of laser cut, and cold glue rather than hot lamination, which would blow the doors wide open on it and everyone could make that style of robot really easily.
There is a whole family of RoACH robots. Here is a fun one with an inertial tail appendage, the TaylRoACH:
https://www.youtube.com/watch?v=Cws1Ua0Wna8
I usually don’t like to give these people business because they are a bunch of thieving monsters, but they have put a ton of effort into commercializing this same style of robot, and have a really excellently performing piece of hardware that you can pre-order right now:
https://www.kickstarter.com/projects/2141368214/kamigami-worlds-first-diy-lightning-fast-origami-r
Do they have to be open designs? There is always Robert Woods amazing robobee, but you need $1m+ in equipment to build and operate one: http://robobees.seas.harvard.edu/
A UMD lab has a ton of microrobots, too: https://sites.google.com/site/microroboticslaboratory/
And this is the one that is probably of most interest to this category:
http://spectrum.ieee.org/automaton/robotics/robotics-hardware/miniature-quadruped-robot-is-blazingly-fast
Whoops, the OpenRoACH picture didn’t work … trying again:
http://i.imgur.com/KilGI1h.jpg
Love these projects, got a few ideas for some tiny autonomous RC robots.
I want them to recharge themselves, I think the easiest thing would be getting them to drive into a wireless charging pad, but struggling to find a way to fit lipo charging on board.
Most tiny toys have the lipo charger external with you just turning the toy off and plugging it in. But I need the toy to be on while charging so it can drive away when done.