For some reason, we seem to really want our robots to walk on two legs like we do. And this despite how much the robots themselves want to be made out of motors, which match up so naturally with wheels. The result is a proliferation of inventive walking mechanisms. Here’s another.
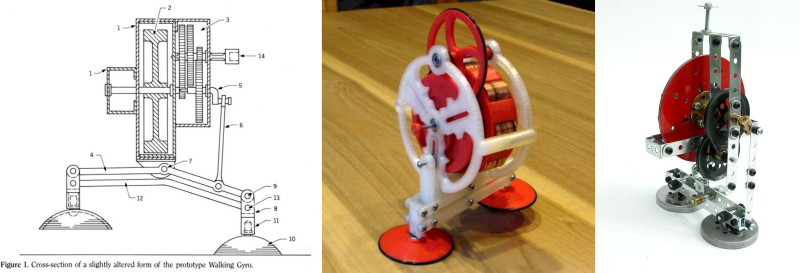
Gyroman is a 3D printed gyroscope with legs. The gyroscope is geared down to lift one leg and then the other. First-semester physics, that we still find a little bit magical, makes the gyro precess and the robot turns a bit. Time these just right and it walks. See the video below for a demo. (Admittedly, Gyroman looks like he’s had a bit too much to drink as he winds down.)
This mechanism is the brainchild of John W. Jameson, who patented it. Who knew that there were even toys based on a motorized version of the mechanism? (We envision recreating this with spinning hard-drive platters.)
So using gyros to walk is old, but we’re dredging it up because it’s so cool and we’ve never covered it. Moreover, the same basic idea of using a gyroscope for motive force keeps popping up over and over again. Which leads us to wonder, what other gyro-based robots are lurking around out there?














This was our take at a walking gyroscopic robot:
http://optisimon.com/walking_cube/2015/12/13/walking-cube/
Well done and even better-documented. Thanks!
now that’s an idea for a Megaman end boss…
Would you call a fleet of them walking down the street a “precession”?
ಠ_ಠ
I see Gonk droids…
BTW, there is also an Instructable for making a 3D printed Gyroman that has a lot more detailed documentation: http://www.instructables.com/id/Gyroman-Walking-Gyroscope/
I want to put this into a stuffed penguin sooooo bad!
+1
That’s cute!
Looks like Homer Simpson struggling home from the bar…